|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
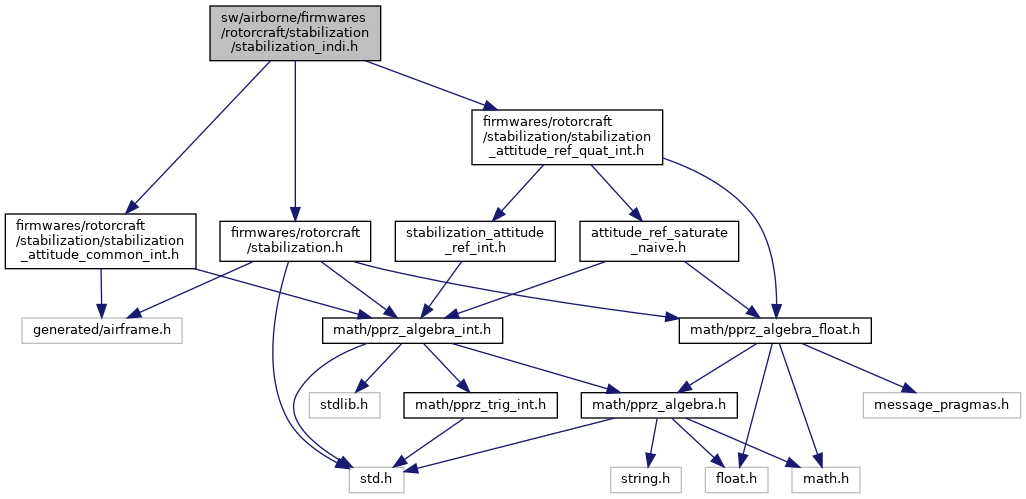
#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_common_int.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_quat_int.h"#include "math/wls/wls_alloc.h" Include dependency graph for stabilization_indi.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stabilization_indi.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Indi_gains |
Macros | |
| #define | INDI_G_SCALING 1000.0 |
Functions | |
| void | stabilization_indi_init (void) |
| Function that initializes important values upon engaging INDI. | |
| void | stabilization_indi_enter (void) |
| Function that resets important values upon engaging INDI. | |
| void | stabilization_indi_rate_run (bool in_flight, struct StabilizationSetpoint *rate_sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
| Does the INDI calculations. | |
| void | stabilization_indi_attitude_run (bool in_flight, struct StabilizationSetpoint *att_sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
| runs stabilization indi | |
| void | stabilization_indi_set_wls_settings (void) |
| Function that sets the u_min, u_max and u_pref if function not elsewhere defined. | |
| void | stabilization_indi_update_filt_freq (float freq) |
| struct FloatRates | stabilization_indi_attitude_controller (struct FloatQuat att, struct FloatQuat att_sp, struct FloatRates rates_ff) |
| Default PD angular rate controller. | |
| struct FloatRates | stabilization_indi_rate_controller (struct FloatRates rates, struct FloatRates sp) |
| Default PD angular acceleration controller. | |
Variables | |
| float | g1g2 [INDI_OUTPUTS][INDI_NUM_ACT] |
| float | actuator_state_filt_vect [INDI_NUM_ACT] |
| struct FloatVect3 | stab_thrust_filt |
| int16_t | actuators_pprz [INDI_NUM_ACT+1] |
| PPRZ command to each actuator Can be used to directly control actuators from the control algorithm if the command_laws are set up appropriately in the airframe file. | |
| bool | act_is_servo [INDI_NUM_ACT] |
| bool | indi_use_adaptive |
| float * | Bwls [INDI_OUTPUTS] |
| float | thrust_bx_eff |
| float | thrust_bx_act_dyn |
| float | actuator_thrust_bx_pprz |
| float | thrust_bx_state_filt |
| float | act_pref [INDI_NUM_ACT] |
| float | stablization_indi_yaw_dist_limit |
| struct Indi_gains | indi_gains |
| float | stabilization_indi_filter_freq |
| struct WLS_t | wls_stab_p |
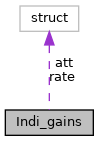
| struct Indi_gains |
Definition at line 58 of file stabilization_indi.h.
Collaboration diagram for Indi_gains:| Data Fields | ||
|---|---|---|
| struct FloatRates | att | |
| struct FloatRates | rate | |
| #define INDI_G_SCALING 1000.0 |
Definition at line 31 of file stabilization_indi.h.
|
extern |
Default PD angular rate controller.
Takes the current attitude filtered state and setpoint and compute the desired rates. Can be redefined elsewhere to use an other control scheme.
Default PD angular rate controller.
Takes the current attitude filtered state and setpoint and compute the desired rates. Can be redefined elsewhere to use an other control scheme.
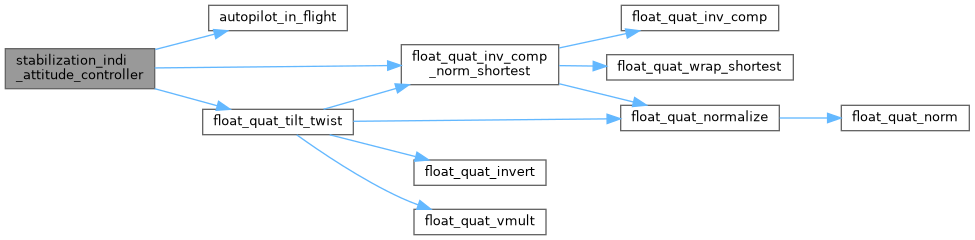
Definition at line 840 of file stabilization_indi.c.
References Ap, Indi_gains::att, att_state, autopilot_in_flight(), Bp, Cp, Dp, float_quat_inv_comp_norm_shortest(), float_quat_tilt_twist(), FLOAT_RATES_ZERO, foo, indi_gains, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, and RATES_ADD.
Referenced by stabilization_indi_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
runs stabilization indi
| in_flight | enable integrator only in flight | |
| att_sp | attitude stabilization setpoint | |
| thrust | thrust setpoint | |
| [out] | output | command vector |
Function that should be called to run the INDI controller
| in_flight | not used |
| rate_control | rate control enabled, otherwise attitude control |
Definition at line 818 of file stabilization_indi.c.
Function that resets important values upon engaging INDI.
Don't reset inputs and filters, because it is unlikely to switch stabilization in flight, and there are multiple modes that use (the same) stabilization. Resetting the controller is not so nice when you are flying. FIXME: Ideally we should detect when coming from something that is not INDI
Definition at line 497 of file stabilization_indi.c.
Function that initializes important values upon engaging INDI.
Definition at line 422 of file stabilization_indi.c.
|
extern |
Default PD angular acceleration controller.
Takes the current rates filtered state and setpoint and compute the desired acceleration. Can be redefined elsewhere to use an other control scheme.
Default PD angular acceleration controller.
Takes the current rates filtered state and setpoint and compute the desired acceleration.
Definition at line 874 of file stabilization_indi.c.
References Ad, autopilot_in_flight(), Bd, Cd, Dd, FLOAT_RATES_ZERO, foo, indi_gains, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, rate_state, and RATES_DIFF.
Referenced by stabilization_indi_rate_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Does the INDI calculations.
| in_flight | boolean that states if the UAV is in flight or not |
| sp | rate setpoint |
| thrust | thrust setpoint |
| cmd | output command array |
Function that calculates the INDI commands
| in_flight | true aircraft is flying |
| sp | rate setpoint |
| thrust | thrust setpoint |
| cmd | output command array |
Definition at line 602 of file stabilization_indi.c.
Function that sets the u_min, u_max and u_pref if function not elsewhere defined.
Definition at line 888 of file stabilization_indi.c.
References act_is_servo, act_pref, actuator_state_filt_vect, actuators_pprz, CMH_ACT_MOTOR_LEFT, CMH_ACT_MOTOR_RIGHT, CMH_ACT_MOTOR_TAIL, CMH_ACT_YAW, CMH_MOTOR_IDLE, CMH_TILT_DIFF_MAX, eff_sched_pusher_time, foo, guidance_h, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, MAX_PPRZ, HorizontalGuidance::mode, rw_flap_offset, STABILIZATION_INDI_THROTTLE_LIMIT_AIRSPEED_FWD, stateGetAirspeed_f(), WLS_t::u_max, WLS_t::u_min, WLS_t::u_pref, and wls_stab_p.
Referenced by stabilization_indi_rate_run().
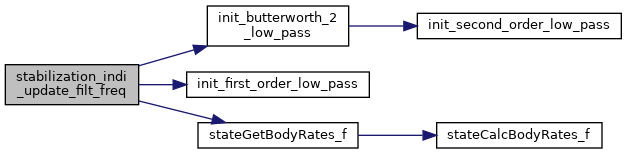
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 503 of file stabilization_indi.c.
References foo, init_butterworth_2_low_pass(), init_first_order_low_pass(), p, rates_filt_fo, stabilization_indi_filter_freq, and stateGetBodyRates_f().
Here is the call graph for this function:
|
extern |
Definition at line 205 of file stabilization_indi.c.
Referenced by ground_detect_periodic(), stabilization_indi_init(), stabilization_indi_rate_run(), and stabilization_indi_set_wls_settings().
|
extern |
Definition at line 167 of file stabilization_indi.c.
Referenced by ctrl_eff_scheduling_periodic(), and stabilization_indi_set_wls_settings().
|
extern |
Definition at line 240 of file stabilization_indi.c.
Referenced by eff_scheduling_cyfoam_periodic(), eff_scheduling_periodic_b(), eff_scheduling_rotwing_update_cmd(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), ground_detect_periodic(), guidance_indi_hybrid_set_wls_settings(), stabilization_indi_init(), stabilization_indi_rate_run(), and stabilization_indi_set_wls_settings().
|
extern |
|
extern |
PPRZ command to each actuator Can be used to directly control actuators from the control algorithm if the command_laws are set up appropriately in the airframe file.
FIXME add an extra slot for specific case (e.g. rotwing in simulation)
Definition at line 314 of file stabilization_indi.c.
Referenced by actuators_hitl_periodic(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_attitude_plane(), control_mixing_heewing_nav_run(), ekf_aw_wrapper_fetch(), nps_autopilot_run_step(), rotwing_state_periodic(), schdule_control_effectiveness(), stabilization_indi_rate_run(), and stabilization_indi_set_wls_settings().
|
extern |
Definition at line 172 of file stabilization_indi.c.
Referenced by eff_scheduling_cyfoam_periodic(), stabilization_indi_init(), and stabilization_indi_rate_run().
|
extern |
Definition at line 307 of file stabilization_indi.c.
Referenced by eff_scheduling_falcon_init(), eff_scheduling_falcon_periodic(), eff_scheduling_falcon_report(), eff_scheduling_generic_periodic(), eff_scheduling_periodic_a(), eff_scheduling_periodic_b(), eff_scheduling_rotwing_update_aileron_effectiveness(), eff_scheduling_rotwing_update_elevator_effectiveness(), eff_scheduling_rotwing_update_flaperon_effectiveness(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), eff_scheduling_rotwing_update_pusher_effectiveness(), eff_scheduling_rotwing_update_rudder_effectiveness(), ground_detect_periodic(), guidance_indi_hybrid_set_wls_settings(), guidance_indi_run(), schdule_control_effectiveness(), send_eff_mat_g_indi(), stabilization_indi_init(), and sum_g1_g2().
|
extern |
Definition at line 185 of file stabilization_indi.c.
Referenced by eff_scheduling_periodic_b(), stabilization_indi_attitude_controller(), and stabilization_indi_rate_controller().
|
extern |
Definition at line 198 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
|
extern |
Definition at line 246 of file stabilization_indi.c.
Referenced by guidance_indi_calcG(), guidance_indi_set_wls_settings(), and stabilization_indi_rate_run().
|
extern |
Definition at line 251 of file stabilization_indi.c.
Referenced by stabilization_indi_update_filt_freq().
|
extern |
Definition at line 237 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
|
extern |
|
extern |
|
extern |
|
extern |
Definition at line 325 of file stabilization_andi.c.
Referenced by schdule_control_effectiveness(), send_wls_u_stab(), send_wls_v_stab(), send_wls_v_stabilization_andi(), stabilization_andi_run(), stabilization_indi_rate_run(), and stabilization_indi_set_wls_settings().