|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
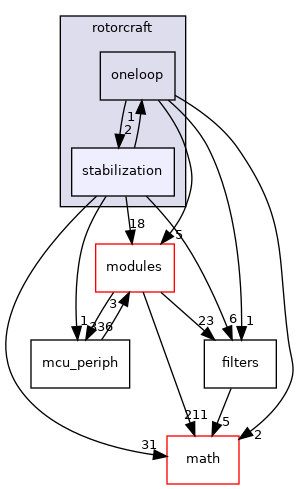
 Directory dependency graph for stabilization:
Directory dependency graph for stabilization:Files | |
| attitude_ref_saturate_naive.h | |
| Naive attitude reference saturation. | |
| obm_cyclone.c | |
| stabilization_andi.c | |
| ANDI stabilization controller for tiltbody rotorcraft. | |
| stabilization_andi.h | |
| ANDI stabilization controller for tiltbody rotorcraft. | |
| stabilization_attitude.h | |
| General attitude stabilization interface for rotorcrafts. | |
| stabilization_attitude_common_float.h | |
| Common data structures shared by euler and quaternion float implementations. | |
| stabilization_attitude_common_int.h | |
| Common data structures shared by euler and quaternion int implementations. | |
| stabilization_attitude_euler_float.c | |
| Rotorcraft attitude stabilization in euler float version. | |
| stabilization_attitude_euler_float.h | |
| Rotorcraft attitude stabilization in euler float version. | |
| stabilization_attitude_euler_int.c | |
| Rotorcraft attitude stabilization in euler int version. | |
| stabilization_attitude_euler_int.h | |
| stabilization_attitude_heli_indi.c | |
| Helicopter quaternion INDI attitude stabilization. | |
| stabilization_attitude_heli_indi.h | |
| stabilization_attitude_passthrough.c | |
| passthrough attitude stabilization | |
| stabilization_attitude_passthrough.h | |
| stabilization_attitude_plane_pid.c | |
| Basic fixed-wing attitude stabilization in euler float version. | |
| stabilization_attitude_plane_pid.h | |
| Basic fixed-wing attitude stabilization in euler float version. | |
| stabilization_attitude_quat_float.c | |
| Quaternion attitude stabilization (floating point). | |
| stabilization_attitude_quat_float.h | |
| Rotorcraft attitude stabilization in quaternion float version. | |
| stabilization_attitude_quat_indi.c | |
| MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI) | |
| stabilization_attitude_quat_indi.h | |
| This is the header file of the corresponding c file. | |
| stabilization_attitude_quat_int.c | |
| Rotorcraft quaternion attitude stabilization. | |
| stabilization_attitude_quat_int.h | |
| stabilization_attitude_quat_transformations.c | |
| Quaternion transformation functions. | |
| stabilization_attitude_quat_transformations.h | |
| Quaternion transformation functions. | |
| stabilization_attitude_rc_setpoint.c | |
| Read an attitude setpoint from the RC. | |
| stabilization_attitude_rc_setpoint.h | |
| Read an attitude setpoint from the RC. | |
| stabilization_attitude_ref_defaults.h | |
| Default values for attitude reference saturation. | |
| stabilization_attitude_ref_euler_float.c | |
| Rotorcraft attitude reference generation in euler float version. | |
| stabilization_attitude_ref_euler_float.h | |
| stabilization_attitude_ref_euler_int.c | |
| Rotorcraft attitude reference generation (euler int version) | |
| stabilization_attitude_ref_euler_int.h | |
| Rotorcraft attitude reference generation (euler int version) | |
| stabilization_attitude_ref_int.h | |
| Rotorcraft attitude reference generation API. | |
| stabilization_attitude_ref_quat_float.c | |
| Rotorcraft attitude reference generation. | |
| stabilization_attitude_ref_quat_float.h | |
| Rotorcraft attitude reference generation. | |
| stabilization_attitude_ref_quat_int.c | |
| Rotorcraft attitude reference generation. | |
| stabilization_attitude_ref_quat_int.h | |
| Rotorcraft attitude reference generation. | |
| stabilization_direct.c | |
| Dummy stabilization for rotorcrafts. | |
| stabilization_direct.h | |
| Dummy stabilization for rotorcrafts. | |
| stabilization_indi.c | |
| stabilization_indi.h | |
| stabilization_indi_hinf.c | |
| stabilization_indi_simple.c | |
| stabilization_indi_simple.h | |
| stabilization_oneloop.c | |
| stabilization_oneloop.h | |
| stabilization_rate.c | |
| Rate stabilization for rotorcrafts. | |
| stabilization_rate.h | |
| Rate stabilization for rotorcrafts. | |
| stabilization_rate_indi.c | |
| Rate stabilization for rotorcrafts based on INDI by Ewoud Smeur. | |
| stabilization_rate_indi.h | |
| Rate stabilization for rotorcrafts based on INDI. | |