|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
passthrough attitude stabilization More...
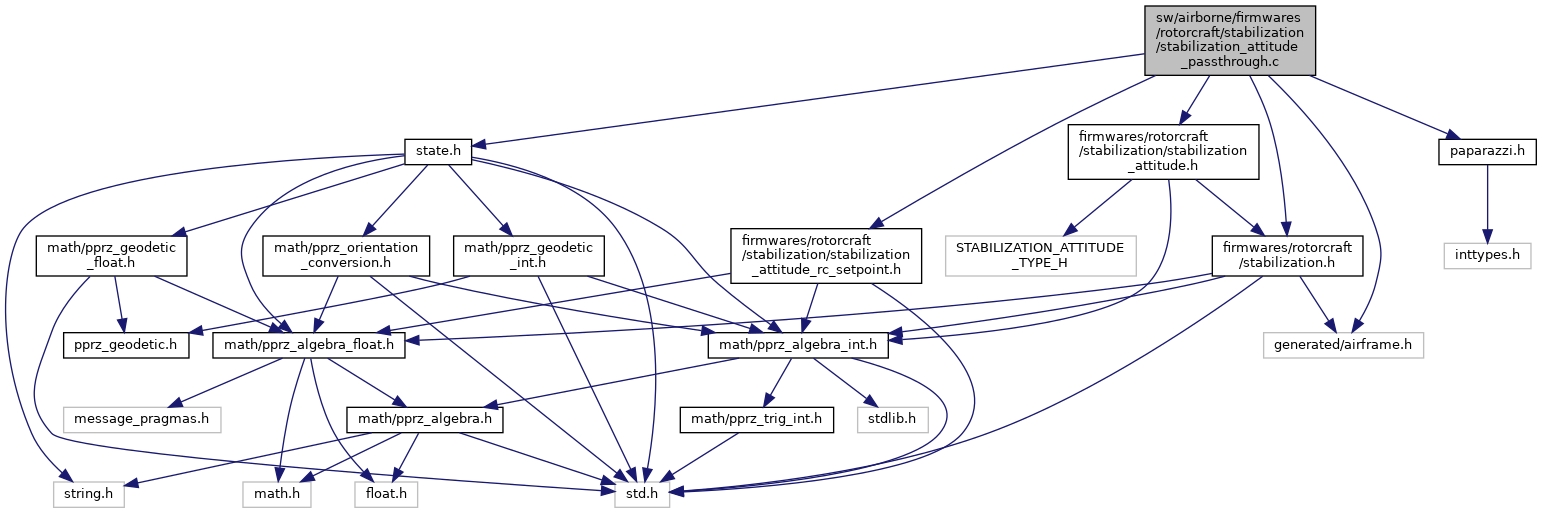
#include "firmwares/rotorcraft/stabilization/stabilization_attitude_passthrough.h"#include "state.h"#include "paparazzi.h"#include "firmwares/rotorcraft/stabilization.h"#include "generated/airframe.h" Include dependency graph for stabilization_attitude_passthrough.c:
Include dependency graph for stabilization_attitude_passthrough.c:Go to the source code of this file.
Macros | |
| #define | TRAJ_MAX_BANK (int32_t)ANGLE_BFP_OF_REAL(GUIDANCE_H_MAX_BANK) |
Functions | |
| void | stabilization_attitude_enter (void) |
| Attitude control enter function. | |
| void | stabilization_attitude_run (bool in_flight, struct StabilizationSetpoint *sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
| Attitude control run function. | |
passthrough attitude stabilization
This is useful for instance when having an AC that has needs no stabilization because it is already been done by other stabilization software onboard or just does not need it at all.
Definition in file stabilization_attitude_passthrough.c.
| #define TRAJ_MAX_BANK (int32_t)ANGLE_BFP_OF_REAL(GUIDANCE_H_MAX_BANK) |
Definition at line 37 of file stabilization_attitude_passthrough.c.
Attitude control enter function.
Definition at line 39 of file stabilization_attitude_passthrough.c.
| void stabilization_attitude_run | ( | bool | in_flight, |
| struct StabilizationSetpoint * | sp, | ||
| struct ThrustSetpoint * | thrust, | ||
| int32_t * | cmd | ||
| ) |
Attitude control run function.
| [in] | in_flight | true if in flight |
| [in] | sp | pointer to the stabilization setpoint structure |
| [in] | thrust | pointer to the thrust setoint structure |
| [out] | cmd | pointer to the output command vector |
Definition at line 43 of file stabilization_attitude_passthrough.c.
References foo, INT32_ANGLE_NORMALIZE, MAX_PPRZ, Int32Eulers::psi, stab_sp_to_eulers_i(), stateGetNedToBodyEulers_i(), th_sp_to_thrust_i(), THRUST_AXIS_Z, and TRAJ_MAX_BANK.
Here is the call graph for this function: