|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Fixedwing autopilot modes (static implementation). More...
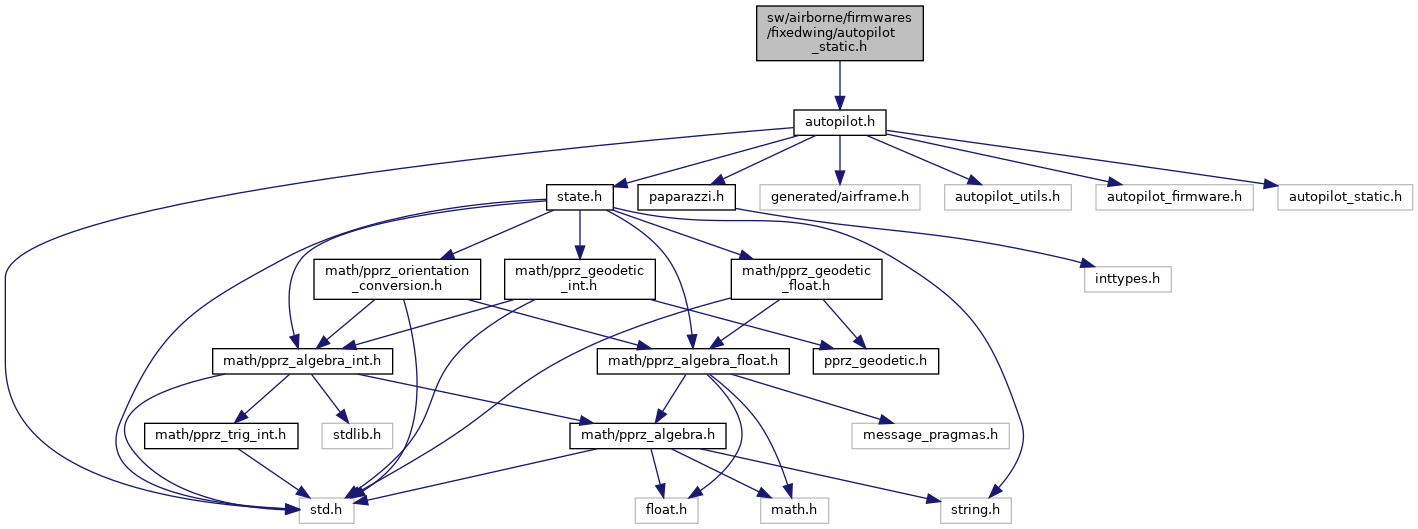
#include "autopilot.h" Include dependency graph for autopilot_static.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_static.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | AP_MODE_MANUAL 0 |
| AP modes. | |
| #define | AP_MODE_AUTO1 1 |
| #define | AP_MODE_AUTO2 2 |
| #define | AP_MODE_HOME 3 |
| #define | AP_MODE_GPS_OUT_OF_ORDER 4 |
| #define | AP_MODE_NB 5 |
| #define | CONTROL_FREQUENCY 60 |
Functions | |
| void | autopilot_static_init (void) |
| Static autopilot functions. | |
| void | autopilot_static_periodic (void) |
| void | autopilot_static_on_rc_frame (void) |
| Function to be called when a message from FBW is available. | |
| void | autopilot_static_set_mode (uint8_t new_autopilot_mode) |
| void | autopilot_static_SetModeHandler (float new_autopilot_mode) |
| AP mode setting handler. | |
| void | autopilot_static_set_motors_on (bool motors_on) |
| void | navigation_task (void) |
| Control loops FIXME should be somewhere else. | |
| void | attitude_loop (void) |
Fixedwing autopilot modes (static implementation).
Definition in file autopilot_static.h.
| #define AP_MODE_AUTO1 1 |
Definition at line 37 of file autopilot_static.h.
| #define AP_MODE_AUTO2 2 |
Definition at line 38 of file autopilot_static.h.
| #define AP_MODE_GPS_OUT_OF_ORDER 4 |
Definition at line 40 of file autopilot_static.h.
| #define AP_MODE_HOME 3 |
Definition at line 39 of file autopilot_static.h.
| #define AP_MODE_MANUAL 0 |
AP modes.
Definition at line 36 of file autopilot_static.h.
| #define AP_MODE_NB 5 |
Definition at line 41 of file autopilot_static.h.
| #define CONTROL_FREQUENCY 60 |
Definition at line 60 of file autopilot_static.h.
Definition at line 299 of file autopilot_static.c.
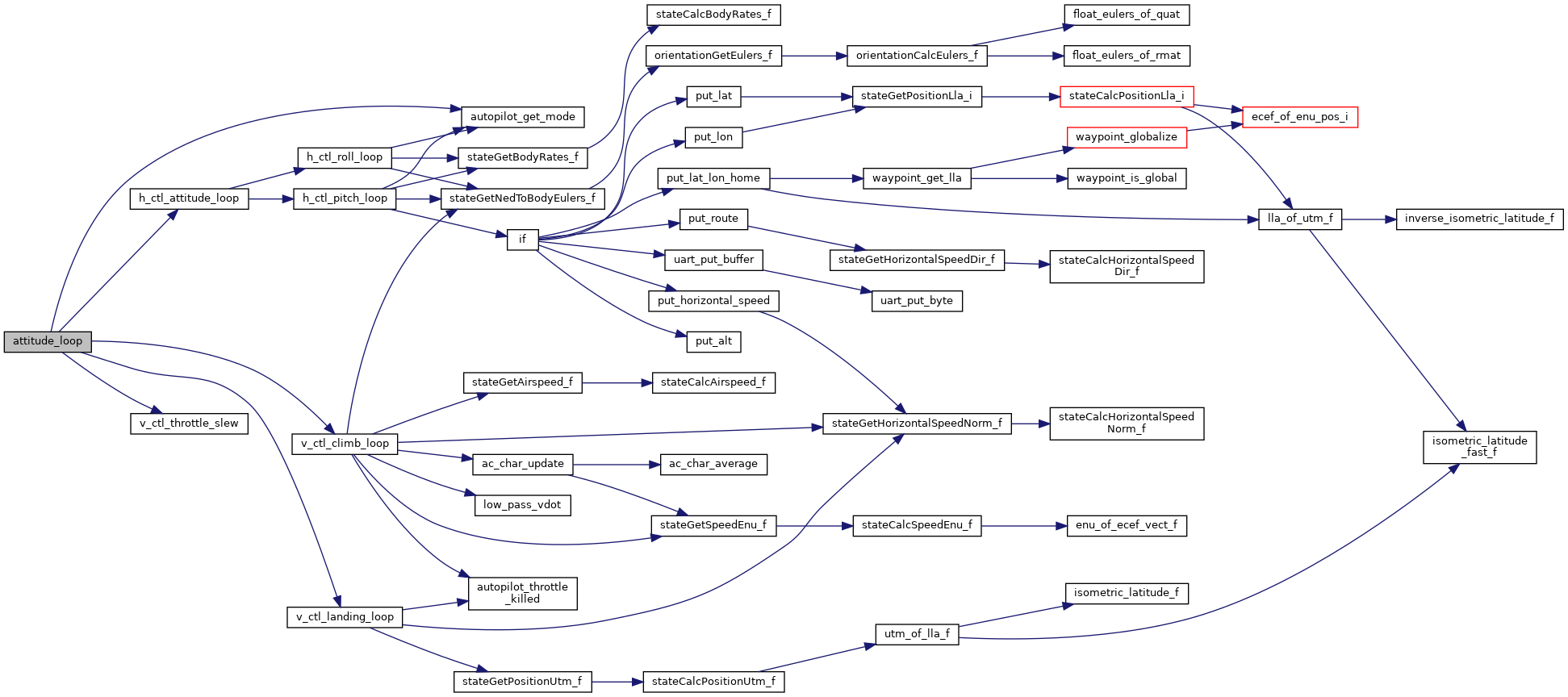
References AP_COMMAND_SET_CL, AP_COMMAND_SET_PITCH, AP_COMMAND_SET_ROLL, AP_COMMAND_SET_THROTTLE, AP_COMMAND_SET_YAW, AP_MODE_AUTO1, AP_MODE_AUTO2, autopilot, autopilot_get_mode(), electrical, pprz_autopilot::flight_time, foo, h_ctl_aileron_setpoint, h_ctl_attitude_loop(), h_ctl_elevator_setpoint, h_ctl_pitch_setpoint, pprz_autopilot::kill_throttle, pprz_autopilot::launch, MAX_PPRZ, nav_pitch, nav_throttle_setpoint, TRIM_PPRZ, TRIM_UPPRZ, v_ctl_climb_loop(), v_ctl_landing_loop(), v_ctl_mode, V_CTL_MODE_AUTO_CLIMB, V_CTL_MODE_AUTO_THROTTLE, V_CTL_MODE_LANDING, v_ctl_pitch_setpoint, v_ctl_throttle_setpoint, v_ctl_throttle_slew(), v_ctl_throttle_slewed, and Electrical::vsupply.
Here is the call graph for this function:Static autopilot functions.
Static autopilot functions.
Definition at line 81 of file autopilot_static.c.
Function to be called when a message from FBW is available.
In AUTO1 mode, compute roll setpoint and pitch setpoint from RADIO_ROLL and RADIO_PITCH
Roll is bounded between [-AUTO1_MAX_ROLL;AUTO1_MAX_ROLL]
Pitch is bounded between [-AUTO1_MAX_PITCH;AUTO1_MAX_PITCH]
Else asynchronously set by h_ctl_course_loop()
In AUTO1, throttle comes from RADIO_THROTTLE In MANUAL, the value is copied to get it in the telemetry
else asynchronously set by v_ctl_climb_loop();
Definition at line 100 of file autopilot_static.c.
Definition at line 93 of file autopilot_static.c.
Definition at line 140 of file autopilot_static.c.
Definition at line 152 of file autopilot_static.c.
AP mode setting handler.
Checks RC status before calling autopilot_static_set_mode function
Definition at line 147 of file autopilot_static.c.
Control loops FIXME should be somewhere else.
Control loops FIXME should be somewhere else.
Definition at line 163 of file autopilot_static.c.
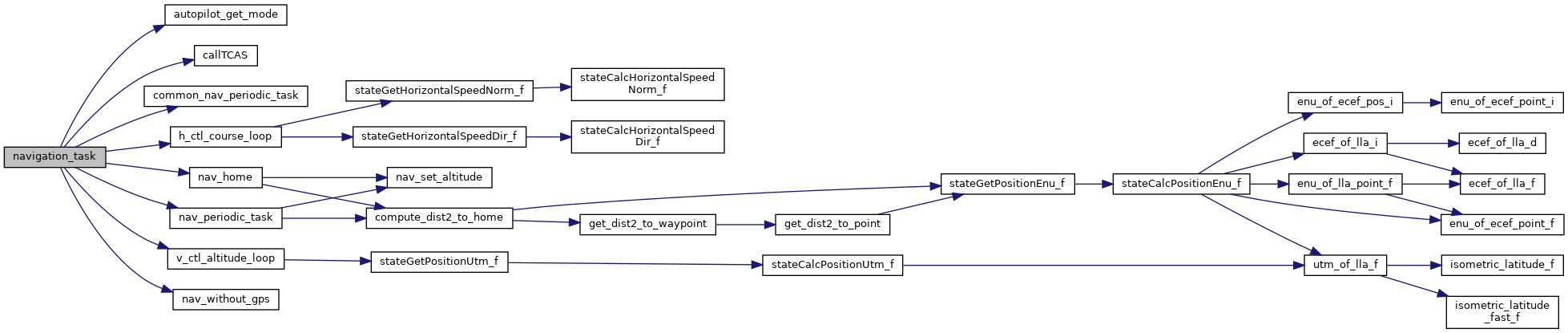
References AP_MODE_AUTO2, AP_MODE_GPS_OUT_OF_ORDER, AP_MODE_HOME, autopilot_get_mode(), callTCAS(), common_nav_periodic_task(), DefaultChannel, DefaultDevice, h_ctl_auto1_rate, h_ctl_course_loop(), lateral_mode, LATERAL_MODE_COURSE, nav_home(), nav_periodic_task(), nav_without_gps(), SEND_NAVIGATION, v_ctl_altitude_loop(), v_ctl_mode, and V_CTL_MODE_AUTO_ALT.
Here is the call graph for this function: