|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Arm the motors using a switch. More...
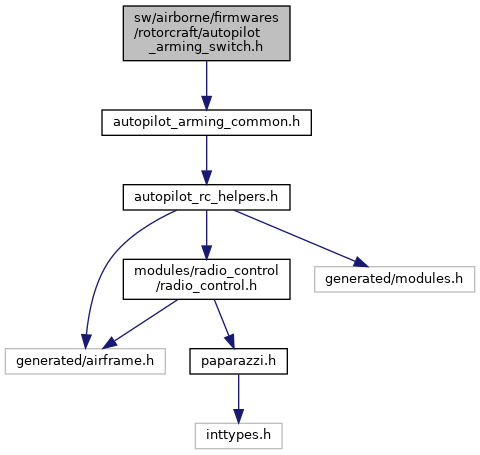
#include "autopilot_arming_common.h" Include dependency graph for autopilot_arming_switch.h:
Include dependency graph for autopilot_arming_switch.h:Go to the source code of this file.
Enumerations | |
| enum | arming_state { STATE_UNINIT , STATE_WAITING , STATE_STARTABLE , STATE_MOTORS_ON } |
Functions | |
| static void | autopilot_arming_init (void) |
| static void | autopilot_arming_set (bool motors_on) |
| static void | autopilot_arming_check_motors_on (void) |
| State machine to check if motors should be turned ON or OFF using the kill switch. | |
Variables | |
| enum arming_state | autopilot_arming_state |
| bool | autopilot_unarmed_in_auto |
Arm the motors using a switch.
Definition in file autopilot_arming_switch.h.
| Enumerator | |
|---|---|
| STATE_UNINIT | |
| STATE_WAITING | |
| STATE_STARTABLE | |
| STATE_MOTORS_ON | |
Definition at line 38 of file autopilot_arming_switch.h.
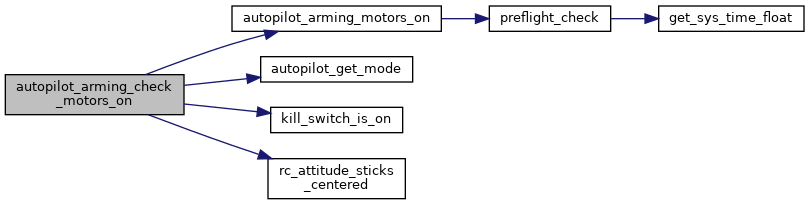
State machine to check if motors should be turned ON or OFF using the kill switch.
If kill switch is off during startup (unkilled), you need to kill again first, then unkill to start. Also to start the motors, throttle needs to be down, other sticks centered, AHRS aligned and you need be in manual mode.
Definition at line 79 of file autopilot_arming_switch.h.
References AP_MODE_FAILSAFE, AP_MODE_KILL, autopilot_arming_motors_on(), autopilot_arming_state, autopilot_get_mode(), autopilot_unarmed_in_auto, kill_switch_is_on(), MODE_MANUAL, rc_attitude_sticks_centered(), STATE_MOTORS_ON, STATE_STARTABLE, STATE_UNINIT, STATE_WAITING, and THROTTLE_STICK_DOWN.
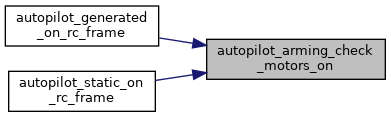
Referenced by autopilot_generated_on_rc_frame(), and autopilot_static_on_rc_frame().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 48 of file autopilot_arming_switch.h.
References autopilot_arming_state, autopilot_unarmed_in_auto, and STATE_UNINIT.
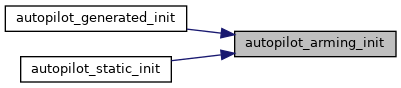
Referenced by autopilot_generated_init(), and autopilot_static_init().
Here is the caller graph for this function:Definition at line 54 of file autopilot_arming_switch.h.
References AP_MODE_FAILSAFE, AP_MODE_KILL, autopilot_arming_state, autopilot_get_mode(), autopilot_unarmed_in_auto, MODE_MANUAL, STATE_MOTORS_ON, and STATE_STARTABLE.
Referenced by autopilot_generated_set_motors_on(), and autopilot_static_set_motors_on().
Here is the call graph for this function: Here is the caller graph for this function:| enum arming_state autopilot_arming_state |
Definition at line 45 of file autopilot_arming_switch.h.
Referenced by autopilot_arming_check_motors_on(), autopilot_arming_init(), and autopilot_arming_set().
| bool autopilot_unarmed_in_auto |
Definition at line 46 of file autopilot_arming_switch.h.
Referenced by autopilot_arming_check_motors_on(), autopilot_arming_init(), and autopilot_arming_set().