|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Low-pass IMU measurements at startup to align the AHRS. More...
#include "ahrs_aligner.h"#include <stdlib.h>#include "modules/imu/imu.h"#include "led.h"#include "modules/core/abi.h"#include "mcu_periph/sys_time.h"#include "modules/datalink/telemetry.h" Include dependency graph for ahrs_aligner.c:
Include dependency graph for ahrs_aligner.c:Go to the source code of this file.
Macros | |
| #define | AHRS_ALIGNER_SAMPLES_NB 100 |
| #define | AHRS_ALIGNER_IMU_ID ABI_BROADCAST |
| #define | LOW_NOISE_THRESHOLD 90000 |
| #define | LOW_NOISE_TIME 5 |
| Number of cycles (100 samples each) with low noise. | |
Functions | |
| static void | gyro_cb (uint8_t sender_id, uint32_t stamp, struct Int32Rates *gyro) |
| static void | send_aligner (struct transport_tx *trans, struct link_device *dev) |
| void | ahrs_aligner_init (void) |
| void | ahrs_aligner_restart (void) |
| void | ahrs_aligner_run (void) |
Variables | |
| struct AhrsAligner | ahrs_aligner |
| static struct Int32Rates | gyro_sum |
| static struct Int32Vect3 | accel_sum |
| static struct Int32Vect3 | mag_sum |
| static int32_t | ref_sensor_samples [AHRS_ALIGNER_SAMPLES_NB] |
| static uint32_t | samples_idx |
| static abi_event | gyro_ev |
Low-pass IMU measurements at startup to align the AHRS.
Definition in file ahrs_aligner.c.
| #define AHRS_ALIGNER_IMU_ID ABI_BROADCAST |
Definition at line 50 of file ahrs_aligner.c.
| #define AHRS_ALIGNER_SAMPLES_NB 100 |
Definition at line 40 of file ahrs_aligner.c.
| #define LOW_NOISE_THRESHOLD 90000 |
Definition at line 108 of file ahrs_aligner.c.
| #define LOW_NOISE_TIME 5 |
Number of cycles (100 samples each) with low noise.
Definition at line 112 of file ahrs_aligner.c.
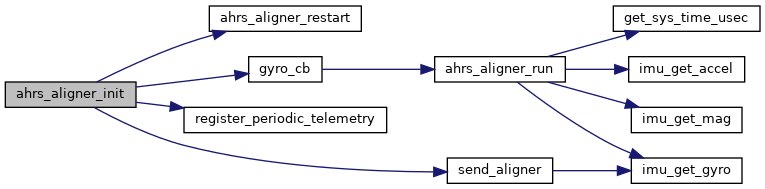
Definition at line 84 of file ahrs_aligner.c.
References AHRS_ALIGNER_IMU_ID, ahrs_aligner_restart(), DefaultPeriodic, foo, gyro_cb(), gyro_ev, register_periodic_telemetry(), and send_aligner().
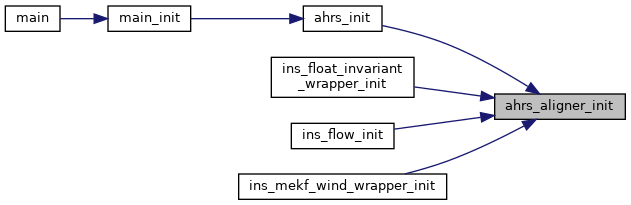
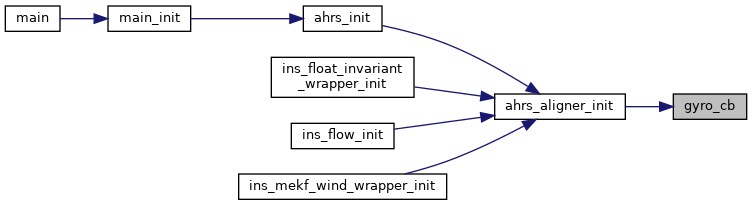
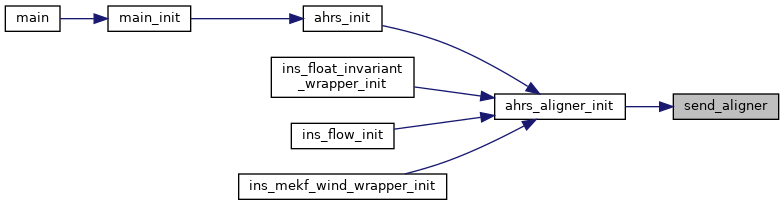
Referenced by ahrs_init(), ins_float_invariant_wrapper_init(), ins_flow_init(), and ins_mekf_wind_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 96 of file ahrs_aligner.c.
References accel_sum, ahrs_aligner, AHRS_ALIGNER_RUNNING, gyro_sum, INT_RATES_ZERO, INT_VECT3_ZERO, AhrsAligner::low_noise_cnt, mag_sum, AhrsAligner::noise, samples_idx, and AhrsAligner::status.
Referenced by ahrs_aligner_init(), and gyro_cb().
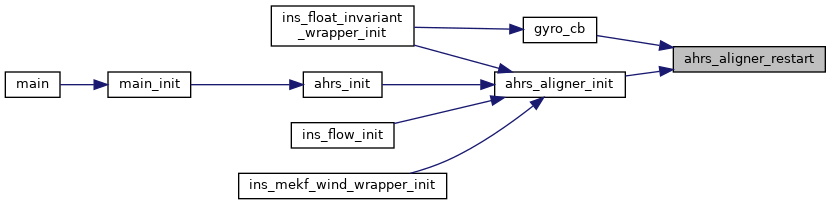
Here is the caller graph for this function:Definition at line 115 of file ahrs_aligner.c.
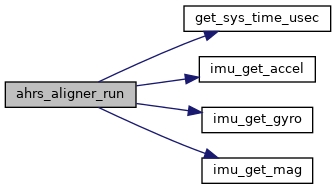
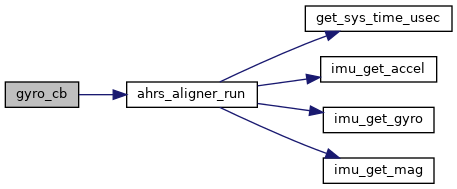
References accel_sum, ahrs_aligner, AHRS_ALIGNER_ID, AHRS_ALIGNER_IMU_ID, AHRS_ALIGNER_LOCKED, AHRS_ALIGNER_SAMPLES_NB, foo, get_sys_time_usec(), gyro_sum, imu_get_accel(), imu_get_gyro(), imu_get_mag(), INT_RATES_ZERO, INT_VECT3_ZERO, LED_ON, LED_TOGGLE, AhrsAligner::low_noise_cnt, LOW_NOISE_THRESHOLD, LOW_NOISE_TIME, AhrsAligner::lp_accel, AhrsAligner::lp_gyro, AhrsAligner::lp_mag, mag_sum, AhrsAligner::noise, RATES_ADD, RATES_SDIV, ref_sensor_samples, samples_idx, imu_gyro_t::scaled, imu_accel_t::scaled, imu_mag_t::scaled, AhrsAligner::status, VECT3_ADD, VECT3_SDIV, and Int32Vect3::z.
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 54 of file ahrs_aligner.c.
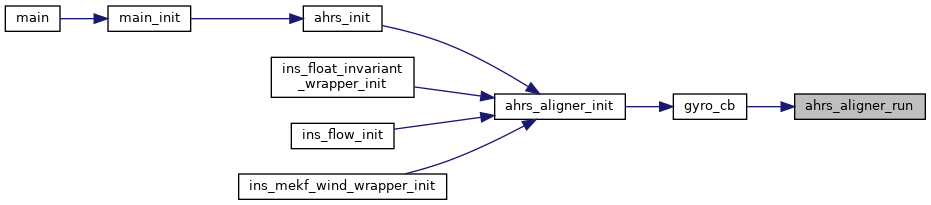
References ahrs_aligner, AHRS_ALIGNER_LOCKED, ahrs_aligner_run(), and AhrsAligner::status.
Referenced by ahrs_aligner_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 66 of file ahrs_aligner.c.
References ahrs_aligner, AHRS_ALIGNER_IMU_ID, dev, foo, imu_get_gyro(), AhrsAligner::low_noise_cnt, AhrsAligner::lp_gyro, AhrsAligner::noise, Int32Rates::p, Int32Rates::q, Int32Rates::r, imu_gyro_t::scaled, and AhrsAligner::status.
Referenced by ahrs_aligner_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 44 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), and ahrs_aligner_run().
| struct AhrsAligner ahrs_aligner |
Definition at line 37 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), ahrs_aligner_run(), gyro_cb(), and send_aligner().
|
static |
Definition at line 52 of file ahrs_aligner.c.
Referenced by ahrs_aligner_init().
|
static |
Definition at line 43 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), and ahrs_aligner_run().
|
static |
Definition at line 45 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), and ahrs_aligner_run().
|
static |
Definition at line 46 of file ahrs_aligner.c.
Referenced by ahrs_aligner_run().
|
static |
Definition at line 47 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), and ahrs_aligner_run().