|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Interface to align the AHRS via low-passed measurements at startup. More...
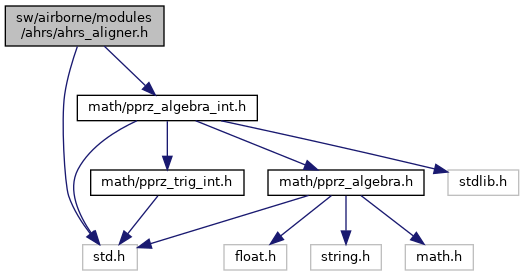
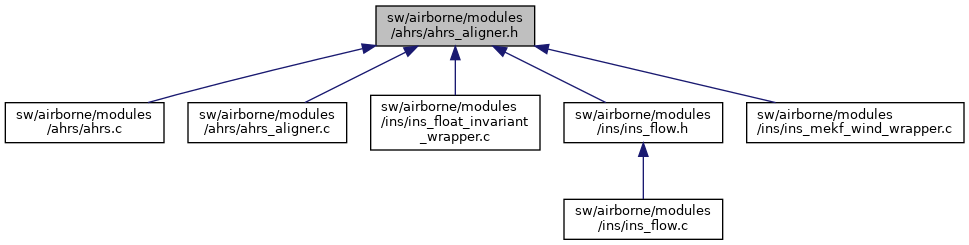
 Include dependency graph for ahrs_aligner.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ahrs_aligner.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AhrsAligner |
Macros | |
| #define | AHRS_ALIGNER_UNINIT 0 |
| #define | AHRS_ALIGNER_RUNNING 1 |
| #define | AHRS_ALIGNER_LOCKED 2 |
Functions | |
| void | ahrs_aligner_init (void) |
| void | ahrs_aligner_restart (void) |
| void | ahrs_aligner_run (void) |
Variables | |
| struct AhrsAligner | ahrs_aligner |
Interface to align the AHRS via low-passed measurements at startup.
Definition in file ahrs_aligner.h.
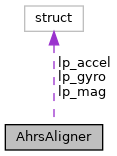
| struct AhrsAligner |
Definition at line 39 of file ahrs_aligner.h.
Collaboration diagram for AhrsAligner:| Data Fields | ||
|---|---|---|
| int32_t | low_noise_cnt | |
| struct Int32Vect3 | lp_accel | |
| struct Int32Rates | lp_gyro | |
| struct Int32Vect3 | lp_mag | |
| int32_t | noise | |
| uint8_t | status | |
| #define AHRS_ALIGNER_LOCKED 2 |
Definition at line 37 of file ahrs_aligner.h.
| #define AHRS_ALIGNER_RUNNING 1 |
Definition at line 36 of file ahrs_aligner.h.
| #define AHRS_ALIGNER_UNINIT 0 |
Definition at line 35 of file ahrs_aligner.h.
Definition at line 84 of file ahrs_aligner.c.
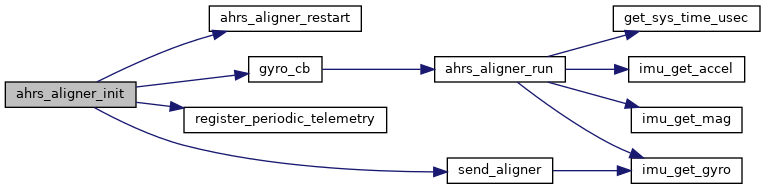
References AHRS_ALIGNER_IMU_ID, ahrs_aligner_restart(), DefaultPeriodic, foo, gyro_cb(), gyro_ev, register_periodic_telemetry(), and send_aligner().
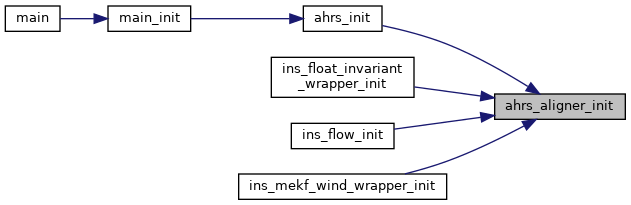
Referenced by ahrs_init(), ins_float_invariant_wrapper_init(), ins_flow_init(), and ins_mekf_wind_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 96 of file ahrs_aligner.c.
References accel_sum, ahrs_aligner, AHRS_ALIGNER_RUNNING, gyro_sum, INT_RATES_ZERO, INT_VECT3_ZERO, AhrsAligner::low_noise_cnt, mag_sum, AhrsAligner::noise, samples_idx, and AhrsAligner::status.
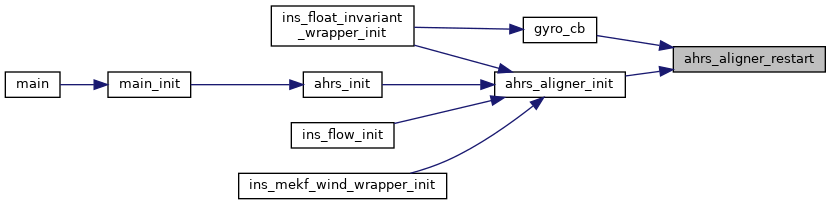
Referenced by ahrs_aligner_init(), and gyro_cb().
Here is the caller graph for this function:Definition at line 115 of file ahrs_aligner.c.
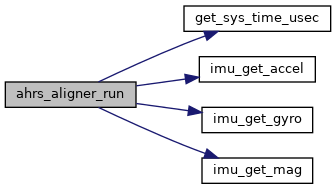
References accel_sum, ahrs_aligner, AHRS_ALIGNER_ID, AHRS_ALIGNER_IMU_ID, AHRS_ALIGNER_LOCKED, AHRS_ALIGNER_SAMPLES_NB, foo, get_sys_time_usec(), gyro_sum, imu_get_accel(), imu_get_gyro(), imu_get_mag(), INT_RATES_ZERO, INT_VECT3_ZERO, LED_ON, LED_TOGGLE, AhrsAligner::low_noise_cnt, LOW_NOISE_THRESHOLD, LOW_NOISE_TIME, AhrsAligner::lp_accel, AhrsAligner::lp_gyro, AhrsAligner::lp_mag, mag_sum, AhrsAligner::noise, RATES_ADD, RATES_SDIV, ref_sensor_samples, samples_idx, imu_gyro_t::scaled, imu_accel_t::scaled, imu_mag_t::scaled, AhrsAligner::status, VECT3_ADD, VECT3_SDIV, and Int32Vect3::z.
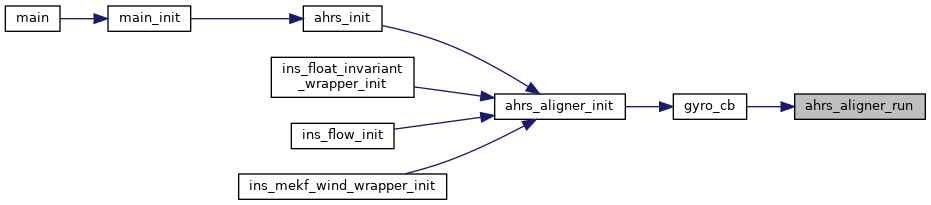
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 37 of file ahrs_aligner.c.
Referenced by ahrs_aligner_restart(), ahrs_aligner_run(), gyro_cb(), and send_aligner().