|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Wind Estimator based on generated library from Matlab. More...
 Include dependency graph for wind_estimator.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for wind_estimator.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | WindEstimator |
Variables | |
| struct WindEstimator | wind_estimator |
Wind Estimator based on generated library from Matlab.
Original Simulink files available at https://github.com/enacuavlab/UKF_Wind_Estimation
Definition in file wind_estimator.h.
| struct WindEstimator |
Definition at line 35 of file wind_estimator.h.
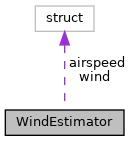
Collaboration diagram for WindEstimator:| Data Fields | ||
|---|---|---|
| struct FloatVect3 | airspeed | airspeed vector in body frame |
| bool | data_available | new data available |
| float | q_va | noise associated to airspeed vector model |
| float | q_va_scale | noise associated to airspeed scale factor model |
| float | q_wind | noise associated to wind vector model |
| float | r_aoa | noise associated to angle of attack measurement |
| float | r_gs | noise associated to ground speed measurement |
| float | r_ssa | noise associated to sideslip angle measurement |
| float | r_va | noise associated to airspeed norm measurement |
| bool | reset | reset filter flag |
| struct FloatVect3 | wind | wind vector in NED frame |
Definition at line 411 of file wind_estimator.c.
References WindEstimator::data_available, DefaultChannel, DefaultDevice, foo, send_wind_estimator(), stateSetHorizontalWindspeed_f(), stateSetVerticalWindspeed_f(), WindEstimator::wind, wind_estimator, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:Definition at line 464 of file wind_estimator.c.
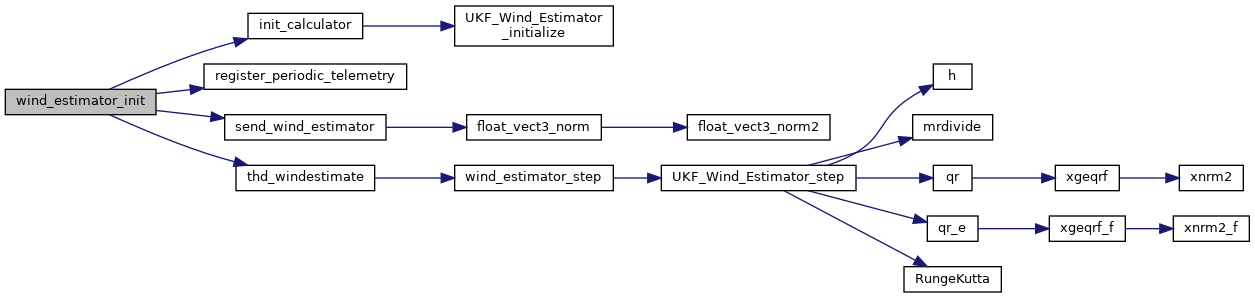
References counter, DefaultPeriodic, foo, init_calculator(), pprzLogFile, register_periodic_telemetry(), send_wind_estimator(), and thd_windestimate().
Here is the call graph for this function:Definition at line 292 of file wind_estimator.c.
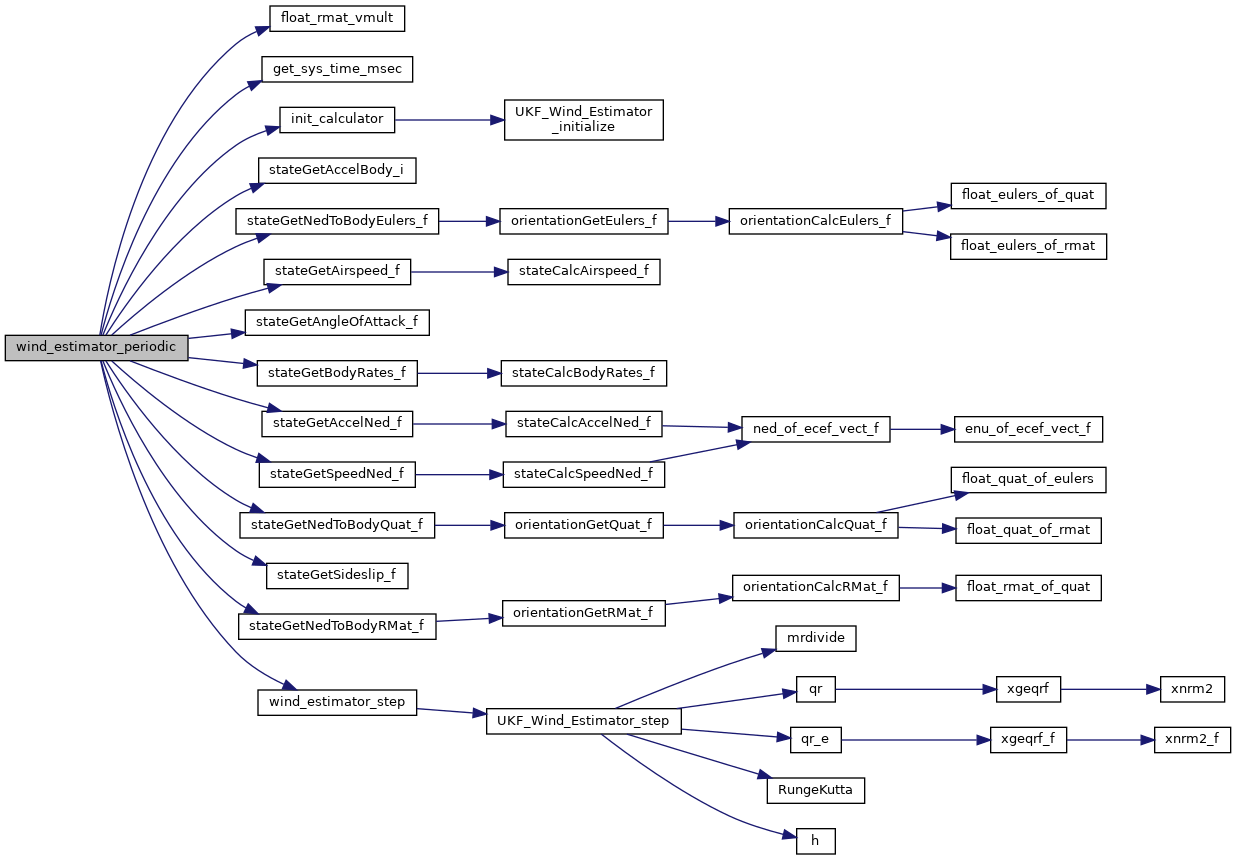
References ExtU::accel, ACCELS_FLOAT_OF_BFP, ExtU::aoa, DefaultChannel, DefaultDevice, ukf_params_tag::dt, float_rmat_vmult(), foo, get_sys_time_msec(), init_calculator(), msg, FloatRates::p, FloatRates::q, ExtU::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, ExtU::rates, WindEstimator::reset, ExtU::sideslip, stateGetAccelBody_i(), stateGetAccelNed_f(), stateGetAirspeed_f(), stateGetAngleOfAttack_f(), stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), stateGetNedToBodyQuat_f(), stateGetNedToBodyRMat_f(), stateGetSideslip_f(), stateGetSpeedNed_f(), time_step_before, ukf_params, ukf_U, ExtU::va, VECT3_ADD, ExtU::vk, wind_estimator, wind_estimator_step(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Here is the call graph for this function:Definition at line 528 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::Q, WindEstimator::q_va, ukf_params, and wind_estimator.
Definition at line 544 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::Q, WindEstimator::q_va_scale, ukf_params, and wind_estimator.
Definition at line 536 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::Q, WindEstimator::q_wind, ukf_params, and wind_estimator.
Definition at line 516 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::R, WindEstimator::r_aoa, ukf_params, and wind_estimator.
Definition at line 502 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::R, WindEstimator::r_gs, ukf_params, and wind_estimator.
Definition at line 522 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::R, WindEstimator::r_ssa, ukf_params, and wind_estimator.
Definition at line 510 of file wind_estimator.c.
References foo, MAT_EL, ukf_params_tag::R, WindEstimator::r_va, ukf_params, and wind_estimator.
|
extern |
Definition at line 125 of file wind_estimator.c.
Referenced by init_calculator(), send_wind_estimator(), wind_estimator_event(), wind_estimator_periodic(), wind_estimator_Set_Q_VA(), wind_estimator_Set_Q_VA_SCALE(), wind_estimator_Set_Q_WIND(), wind_estimator_Set_R_AOA(), wind_estimator_Set_R_GS(), wind_estimator_Set_R_SSA(), wind_estimator_Set_R_VA(), and wind_estimator_step().