|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "modules/sensors/sensors_hitl.h"#include "modules/imu/imu.h"#include "modules/gps/gps.h"#include "modules/core/abi.h"#include "modules/energy/electrical.h"#include "generated/airframe.h"#include "modules/datalink/datalink.h"#include "modules/datalink/telemetry.h"#include "nps_sensors_params_common.h" Include dependency graph for sensors_hitl.c:
Include dependency graph for sensors_hitl.c:Go to the source code of this file.
Data Structures | |
| struct | ImuHitl |
Functions | |
| void | sensors_hitl_init (void) |
| void | sensors_hitl_periodic (void) |
| void | sensors_hitl_parse_HITL_IMU (uint8_t *buf) |
| void | sensors_hitl_parse_HITL_GPS (uint8_t *buf) |
| void | sensors_hitl_parse_HITL_AIR_DATA (uint8_t *buf) |
| void | sensors_hitl_event (void) |
| void | imu_feed_gyro_accel (void) |
| void | imu_feed_mag (void) |
| void | gps_feed_value (void) |
Variables | |
| struct ImuHitl | imu_hitl |
| struct GpsState | gps_hitl = {0} |
| bool | gps_has_fix |
| static bool | sensors_hitl_msg_available = false |
| static uint8_t | sensors_hitl_dl_buffer [MSG_SIZE] |
| static struct pprz_transport | sensors_hitl_tp |
| struct ImuHitl |
Definition at line 34 of file sensors_hitl.c.
Collaboration diagram for ImuHitl:| Data Fields | ||
|---|---|---|
| struct Int32Vect3 | accel | |
| uint8_t | accel_available | |
| struct Int32Rates | gyro | |
| uint8_t | gyro_available | |
| struct Int32Vect3 | mag | |
| uint8_t | mag_available | |
Definition at line 223 of file sensors_hitl.c.
Definition at line 221 of file sensors_hitl.c.
Definition at line 222 of file sensors_hitl.c.
Definition at line 200 of file sensors_hitl.c.
References ImuHitl::accel, ImuHitl::accel_available, DlCheckAndParse(), foo, get_sys_time_usec(), ImuHitl::gyro, ImuHitl::gyro_available, imu_hitl, IMU_NPS_ID, ImuHitl::mag, ImuHitl::mag_available, sensors_hitl_dl_buffer, sensors_hitl_msg_available, and sensors_hitl_tp.
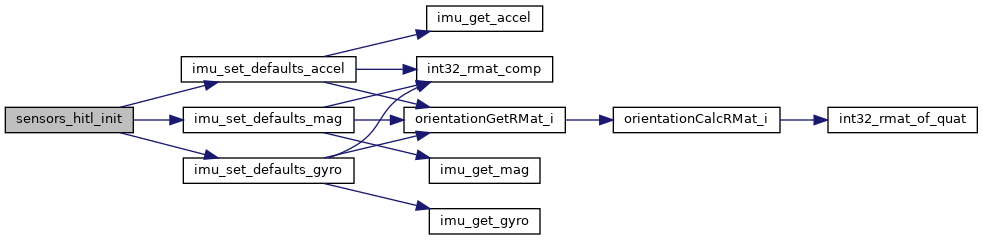
Here is the call graph for this function:Definition at line 52 of file sensors_hitl.c.
References ImuHitl::accel_available, ACCEL_FLOAT_OF_BFP, accel_neutral, accel_scale_f, foo, gps_has_fix, ImuHitl::gyro_available, gyro_scale_f, imu_hitl, IMU_NPS_ID, imu_set_defaults_accel(), imu_set_defaults_gyro(), imu_set_defaults_mag(), ImuHitl::mag_available, MAG_FLOAT_OF_BFP, mag_scale_f, RATE_FLOAT_OF_BFP, and sensors_hitl_tp.
Here is the call graph for this function:Definition at line 177 of file sensors_hitl.c.
References AIRSPEED_NPS_ID, BARO_SIM_SENDER_ID, foo, get_sys_time_usec(), and INCIDENCE_NPS_ID.
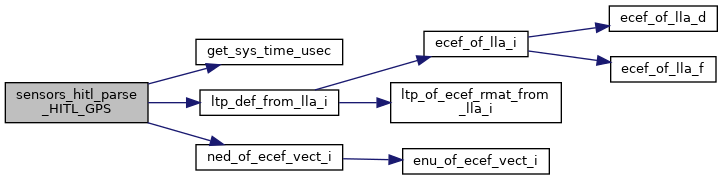
Here is the call graph for this function:Definition at line 110 of file sensors_hitl.c.
References LlaCoor_i::alt, GpsState::course, GpsState::ecef_vel, GpsState::fix, foo, get_sys_time_usec(), GPS_FIX_3D, GPS_FIX_NONE, gps_has_fix, gps_hitl, GPS_SIM_ID, GPS_VALID_COURSE_BIT, GPS_VALID_HMSL_BIT, GPS_VALID_POS_LLA_BIT, GPS_VALID_VEL_ECEF_BIT, GPS_VALID_VEL_NED_BIT, GpsState::gspeed, GpsState::hacc, GpsState::hmsl, GpsState::last_3dfix_ticks, GpsState::last_3dfix_time, GpsState::last_msg_ticks, GpsState::last_msg_time, LlaCoor_i::lat, GpsState::lla_pos, LlaCoor_i::lon, ltp_def_from_lla_i(), sys_time::nb_sec, sys_time::nb_sec_rem, ned_of_ecef_vect_i(), GpsState::ned_vel, GpsState::num_sv, GpsState::pacc, GpsState::pdop, GpsState::sacc, GpsState::speed_3d, GpsState::tow, GpsState::vacc, GpsState::valid_fields, VECT3_FLOAT_OF_CM, GpsState::week, EcefCoor_i::x, NedCoor_i::x, EcefCoor_i::y, NedCoor_i::y, EcefCoor_i::z, and NedCoor_i::z.
Here is the call graph for this function:Definition at line 86 of file sensors_hitl.c.
References ImuHitl::accel, ImuHitl::accel_available, foo, ImuHitl::gyro, ImuHitl::gyro_available, imu_hitl, ImuHitl::mag, ImuHitl::mag_available, RATES_ASSIGN, and VECT3_ASSIGN.
Definition at line 75 of file sensors_hitl.c.
References electrical, foo, and Electrical::vsupply.
| bool gps_has_fix |
Definition at line 46 of file sensors_hitl.c.
Referenced by sensors_hitl_init(), and sensors_hitl_parse_HITL_GPS().
| struct GpsState gps_hitl = {0} |
Definition at line 45 of file sensors_hitl.c.
Referenced by sensors_hitl_parse_HITL_GPS().
| struct ImuHitl imu_hitl |
Definition at line 44 of file sensors_hitl.c.
Referenced by sensors_hitl_event(), sensors_hitl_init(), and sensors_hitl_parse_HITL_IMU().
Definition at line 49 of file sensors_hitl.c.
Referenced by sensors_hitl_event().
Definition at line 48 of file sensors_hitl.c.
Referenced by sensors_hitl_event().
|
static |
Definition at line 50 of file sensors_hitl.c.
Referenced by sensors_hitl_event(), and sensors_hitl_init().