|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
optical-flow calculation for Parrot Drones More...
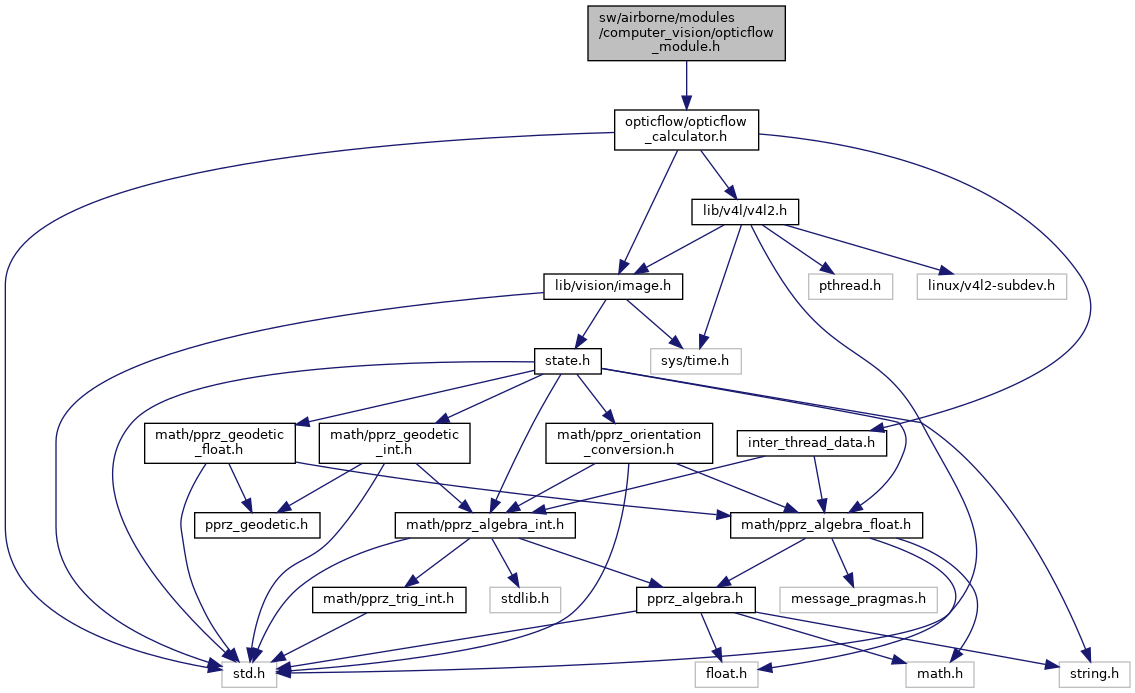
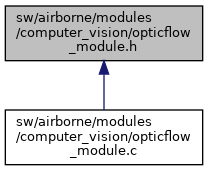
#include "opticflow/opticflow_calculator.h" Include dependency graph for opticflow_module.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for opticflow_module.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | opticflow_module_init (void) |
| Initialize the optical flow module for the bottom camera. | |
| void | opticflow_module_run (void) |
| Update the optical flow state for the calculation thread and update the stabilization loops with the newest result. | |
| void | opticflow_module_start (void) |
| void | opticflow_module_stop (void) |
Variables | |
| struct opticflow_t | opticflow [] |
| Opticflow calculations. | |
optical-flow calculation for Parrot Drones
Definition in file opticflow_module.h.
Initialize the optical flow module for the bottom camera.
Definition at line 110 of file opticflow_module.c.
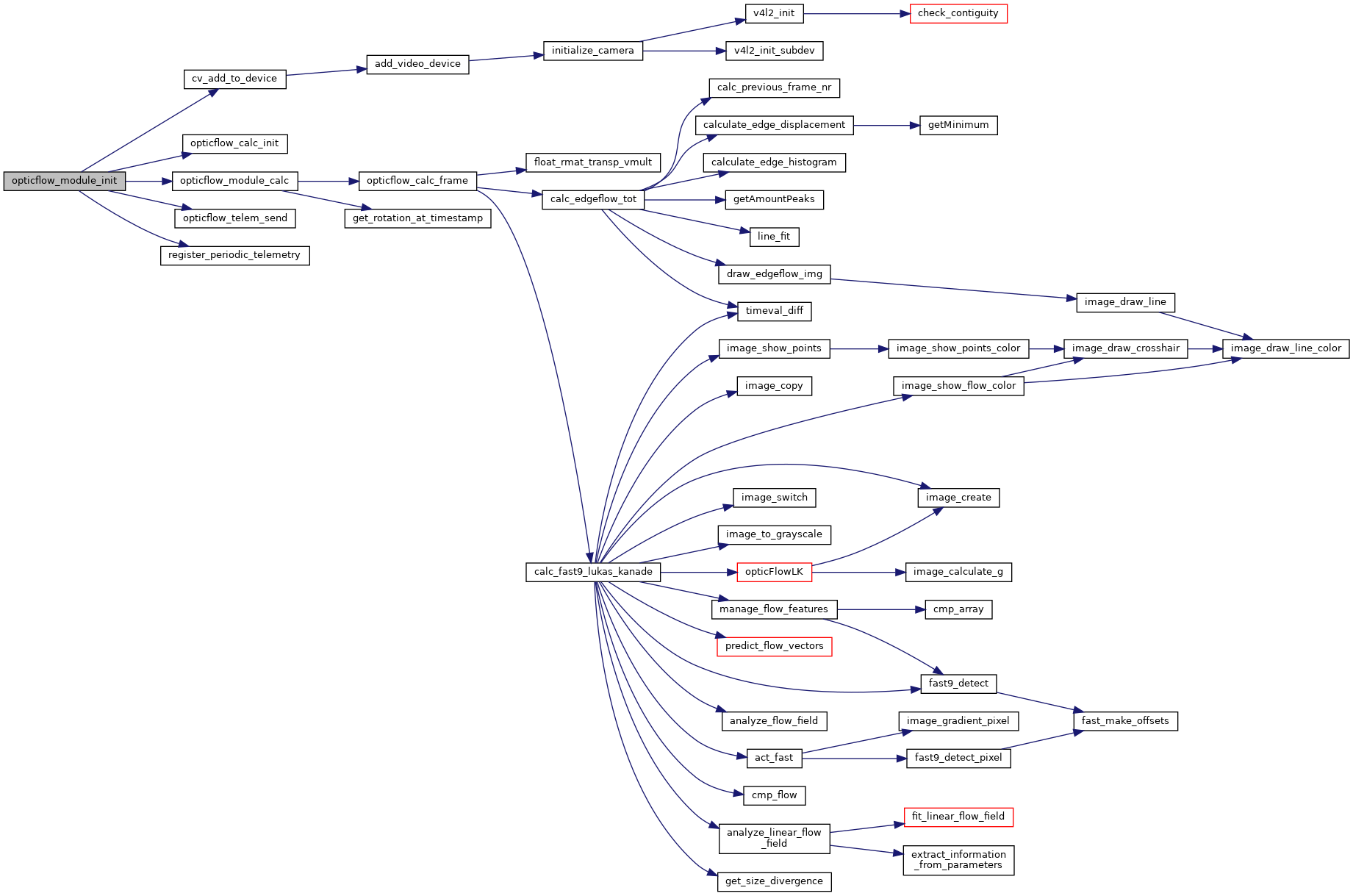
References ACTIVE_CAMERAS, cv_add_to_device(), DefaultPeriodic, foo, opticflow, opticflow_calc_init(), OPTICFLOW_FPS, OPTICFLOW_FPS_CAMERA2, opticflow_got_result, opticflow_module_calc(), opticflow_telem_send(), and register_periodic_telemetry().
Here is the call graph for this function:Update the optical flow state for the calculation thread and update the stabilization loops with the newest result.
Definition at line 133 of file opticflow_module.c.
References ACTIVE_CAMERAS, FLOW_OPTICFLOW_ID, foo, get_sys_time_usec(), opticflow_result_t::noise_measurement, opticflow_got_result, opticflow_mutex, opticflow_result, opticflow_result_t::vel_body, VEL_OPTICFLOW_ID, and FloatVect3::y.
Here is the call graph for this function:
|
extern |
Opticflow calculations.
Definition at line 69 of file opticflow_module.c.
Referenced by calc_edgeflow_tot(), calc_fast9_lukas_kanade(), calc_previous_frame_nr(), manage_flow_features(), opticflow_calc_frame(), opticflow_calc_init(), opticflow_module_calc(), opticflow_module_init(), and predict_flow_vectors().