|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Guidance algorithm based on vector fields 2D straight line trajectory. More...
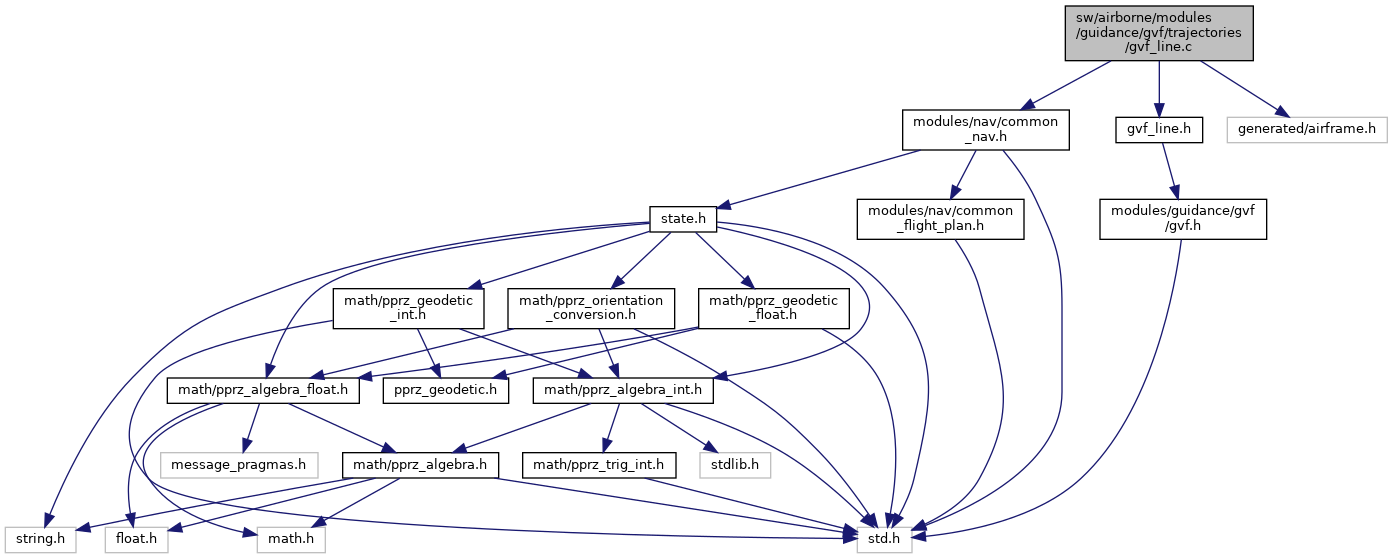
 Include dependency graph for gvf_line.c:
Include dependency graph for gvf_line.c:Go to the source code of this file.
Macros | |
| #define | GVF_LINE_KE 1 |
| #define | GVF_LINE_KN 1 |
| #define | GVF_LINE_HEADING 0 |
| #define | GVF_SEGMENT_D1 0 |
| #define | GVF_SEGMENT_D2 0 |
Functions | |
| void | gvf_line_info (float *phi, struct gvf_grad *grad, struct gvf_Hess *hess) |
Variables | |
| gvf_li_par | gvf_line_par = {GVF_LINE_KE, GVF_LINE_KN, GVF_LINE_HEADING} |
| gvf_seg_par | gvf_segment_par = {GVF_SEGMENT_D1, GVF_SEGMENT_D2} |
Guidance algorithm based on vector fields 2D straight line trajectory.
Definition in file gvf_line.c.
| #define GVF_LINE_HEADING 0 |
Default heading in degrees for a trajectory called from gvf_line_**_HEADING
Definition at line 46 of file gvf_line.c.
| #define GVF_LINE_KE 1 |
Gain ke for the line trajectory
Definition at line 36 of file gvf_line.c.
| #define GVF_LINE_KN 1 |
Gain kn for the line trajectory
Definition at line 41 of file gvf_line.c.
| #define GVF_SEGMENT_D1 0 |
In case of tracking a segment, how much distance in meters will go the vehicle beyond the point x1,y1 before turning back
Definition at line 51 of file gvf_line.c.
| #define GVF_SEGMENT_D2 0 |
In case of tracking a segment, how much distance in meters will go the vehicle beyond the point x2,y2 before turning back
Definition at line 56 of file gvf_line.c.
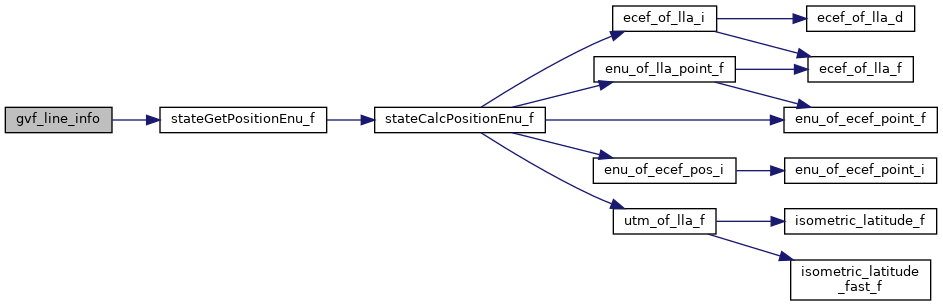
Definition at line 62 of file gvf_line.c.
References alpha, b, foo, gvf_trajectory, gvf_tra::p, p, and stateGetPositionEnu_f().
Referenced by gvf_line().
Here is the call graph for this function: Here is the caller graph for this function:| gvf_li_par gvf_line_par = {GVF_LINE_KE, GVF_LINE_KN, GVF_LINE_HEADING} |
Definition at line 59 of file gvf_line.c.
Referenced by gvf_line().
| gvf_seg_par gvf_segment_par = {GVF_SEGMENT_D1, GVF_SEGMENT_D2} |
Definition at line 60 of file gvf_line.c.