|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Optical-flow based control for Linux based systems. More...
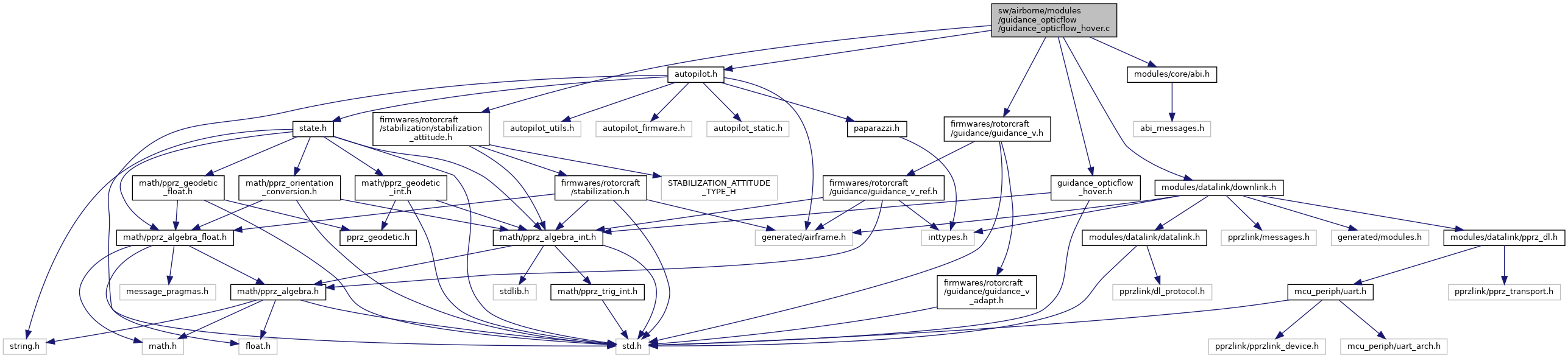
#include "guidance_opticflow_hover.h"#include "modules/core/abi.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "autopilot.h"#include "modules/datalink/downlink.h" Include dependency graph for guidance_opticflow_hover.c:
Include dependency graph for guidance_opticflow_hover.c:Go to the source code of this file.
Macros | |
| #define | VISION_VELOCITY_ESTIMATE_ID ABI_BROADCAST |
| Default sender to accect VELOCITY_ESTIMATE messages from. | |
| #define | CMD_OF_SAT 1500 |
| #define | VISION_PHI_PGAIN 400 |
| #define | VISION_PHI_IGAIN 20 |
| #define | VISION_THETA_PGAIN 400 |
| #define | VISION_THETA_IGAIN 20 |
| #define | VISION_DESIRED_VX 0 |
| #define | VISION_DESIRED_VY 0 |
Functions | |
| static void | stabilization_opticflow_vel_cb (uint8_t sender_id, uint32_t stamp UNUSED, float vel_x, float vel_y, float vel_z UNUSED, float noise_x, float noise_y, float noise_z UNUSED) |
| Update the controls on a new VELOCITY_ESTIMATE ABI message. | |
| void | guidance_opticflow_hover_init (void) |
| Initialization of horizontal guidance module. | |
| void | guidance_module_enter (void) |
| guidance mode enter resets the errors and starts the controller. | |
| void | guidance_module_run (bool in_flight) |
| Main guidance loop. | |
Variables | |
| static abi_event | velocity_est_ev |
| struct opticflow_stab_t | opticflow_stab |
Optical-flow based control for Linux based systems.
Control loops for optic flow based hovering. Computes setpoint for the lower level attitude stabilization to control horizontal velocity.
Definition in file guidance_opticflow_hover.c.
| #define CMD_OF_SAT 1500 |
Definition at line 47 of file guidance_opticflow_hover.c.
| #define VISION_DESIRED_VX 0 |
Definition at line 70 of file guidance_opticflow_hover.c.
| #define VISION_DESIRED_VY 0 |
Definition at line 75 of file guidance_opticflow_hover.c.
| #define VISION_PHI_IGAIN 20 |
Definition at line 55 of file guidance_opticflow_hover.c.
| #define VISION_PHI_PGAIN 400 |
Definition at line 50 of file guidance_opticflow_hover.c.
| #define VISION_THETA_IGAIN 20 |
Definition at line 65 of file guidance_opticflow_hover.c.
| #define VISION_THETA_PGAIN 400 |
Definition at line 60 of file guidance_opticflow_hover.c.
| #define VISION_VELOCITY_ESTIMATE_ID ABI_BROADCAST |
Default sender to accect VELOCITY_ESTIMATE messages from.
Definition at line 43 of file guidance_opticflow_hover.c.
guidance mode enter resets the errors and starts the controller.
Entering the module (user switched to module)
Definition at line 115 of file guidance_opticflow_hover.c.
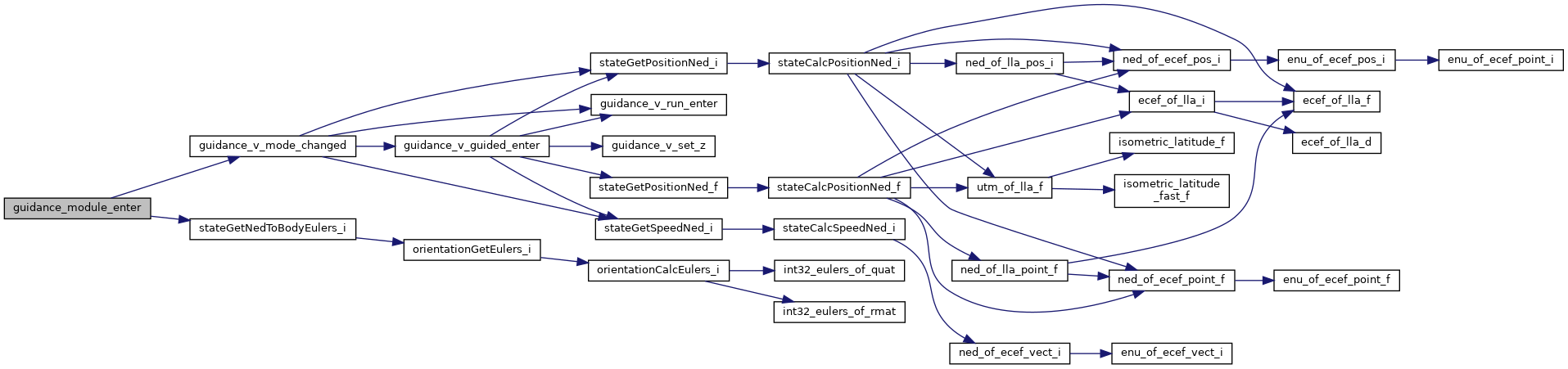
References opticflow_stab_t::cmd, opticflow_stab_t::err_vx_int, opticflow_stab_t::err_vy_int, guidance_v_mode_changed(), GUIDANCE_V_MODE_HOVER, opticflow_stab, Int32Eulers::phi, Int32Eulers::psi, stateGetNedToBodyEulers_i(), and Int32Eulers::theta.
Here is the call graph for this function:Main guidance loop.
| [in] | in_flight | Whether we are in flight or not |
Definition at line 133 of file guidance_opticflow_hover.c.
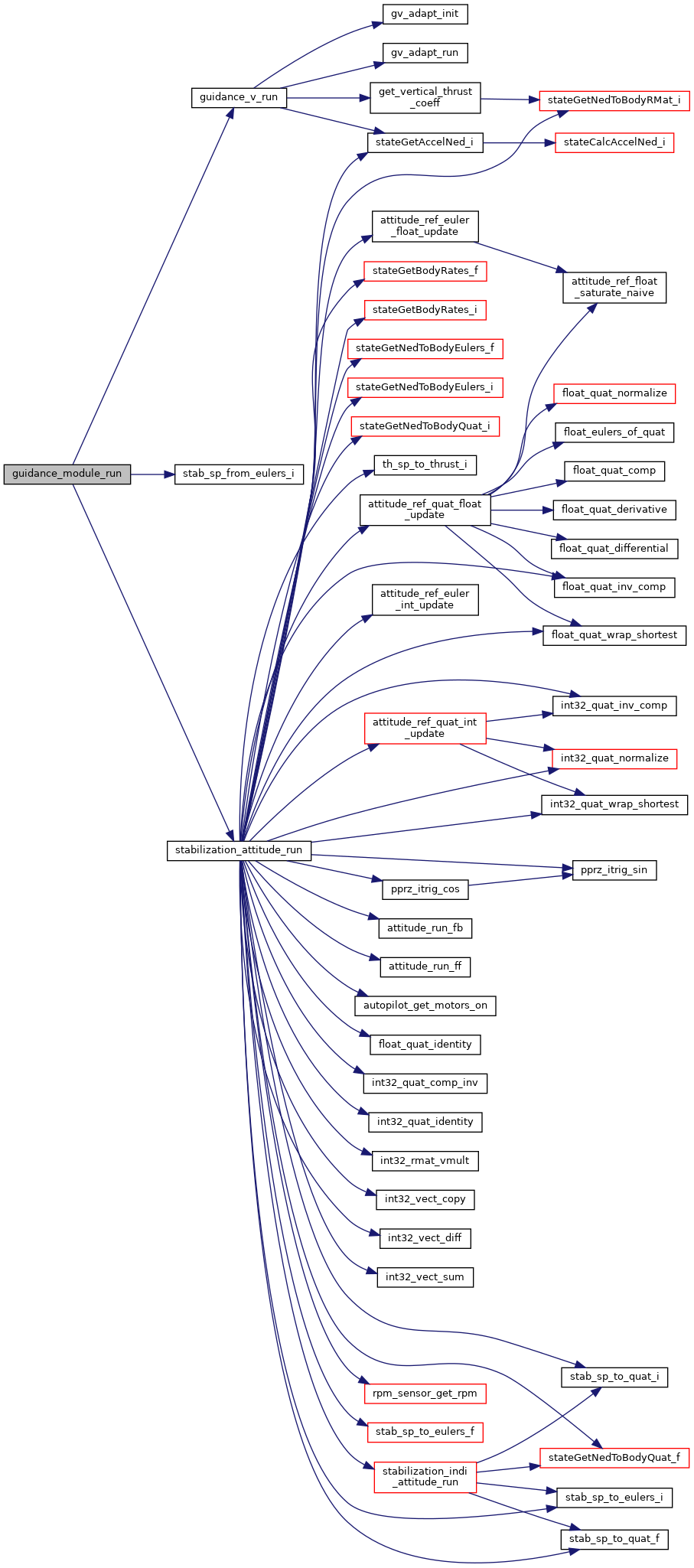
References Stabilization::cmd, opticflow_stab_t::cmd, foo, guidance_v_run(), opticflow_stab, StabilizationSetpoint::sp, ThrustSetpoint::sp, stab_sp_from_eulers_i(), stabilization, and stabilization_attitude_run().
Here is the call graph for this function:Initialization of horizontal guidance module.
Definition at line 105 of file guidance_opticflow_hover.c.
References foo, stabilization_opticflow_vel_cb(), velocity_est_ev, and VISION_VELOCITY_ESTIMATE_ID.
Here is the call graph for this function:
|
static |
Update the controls on a new VELOCITY_ESTIMATE ABI message.
Definition at line 144 of file guidance_opticflow_hover.c.
References opticflow_stab_t::cmd, CMD_OF_SAT, opticflow_stab_t::desired_vx, opticflow_stab_t::desired_vy, err_vx, opticflow_stab_t::err_vx_int, err_vy, opticflow_stab_t::err_vy_int, foo, opticflow_stab, Int32Eulers::phi, opticflow_stab_t::phi_igain, opticflow_stab_t::phi_pgain, Int32Eulers::theta, opticflow_stab_t::theta_igain, and opticflow_stab_t::theta_pgain.
Referenced by guidance_opticflow_hover_init().
Here is the caller graph for this function:| struct opticflow_stab_t opticflow_stab |
Definition at line 90 of file guidance_opticflow_hover.c.
Referenced by guidance_module_enter(), guidance_module_run(), and stabilization_opticflow_vel_cb().
|
static |
Definition at line 87 of file guidance_opticflow_hover.c.
Referenced by guidance_opticflow_hover_init().