|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for dw1000_arduino.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for dw1000_arduino.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | PRIMARY_GPS GPS_DW1000 |
Functions | |
| void | dw1000_arduino_update_ekf_q (float v) |
| settings handler | |
| void | dw1000_arduino_update_ekf_r_dist (float v) |
| void | dw1000_arduino_update_ekf_r_speed (float v) |
| void | dw1000_arduino_init (void) |
| void | dw1000_arduino_periodic (void) |
| void | dw1000_arduino_report (void) |
| void | dw1000_arduino_event (void) |
| void | dw1000_reset_heading_ref (void) |
| Reset reference heading to current heading AHRS/INS should be aligned before calling this function. | |
Variables | |
| bool | dw1000_use_ekf |
| enable EKF filtering | |
| float | dw1000_ekf_q |
| process and measurements noise | |
| float | dw1000_ekf_r_dist |
| float | dw1000_ekf_r_speed |
Definition in file dw1000_arduino.h.
| #define PRIMARY_GPS GPS_DW1000 |
Definition at line 55 of file dw1000_arduino.h.
Definition at line 617 of file dw1000_arduino.c.
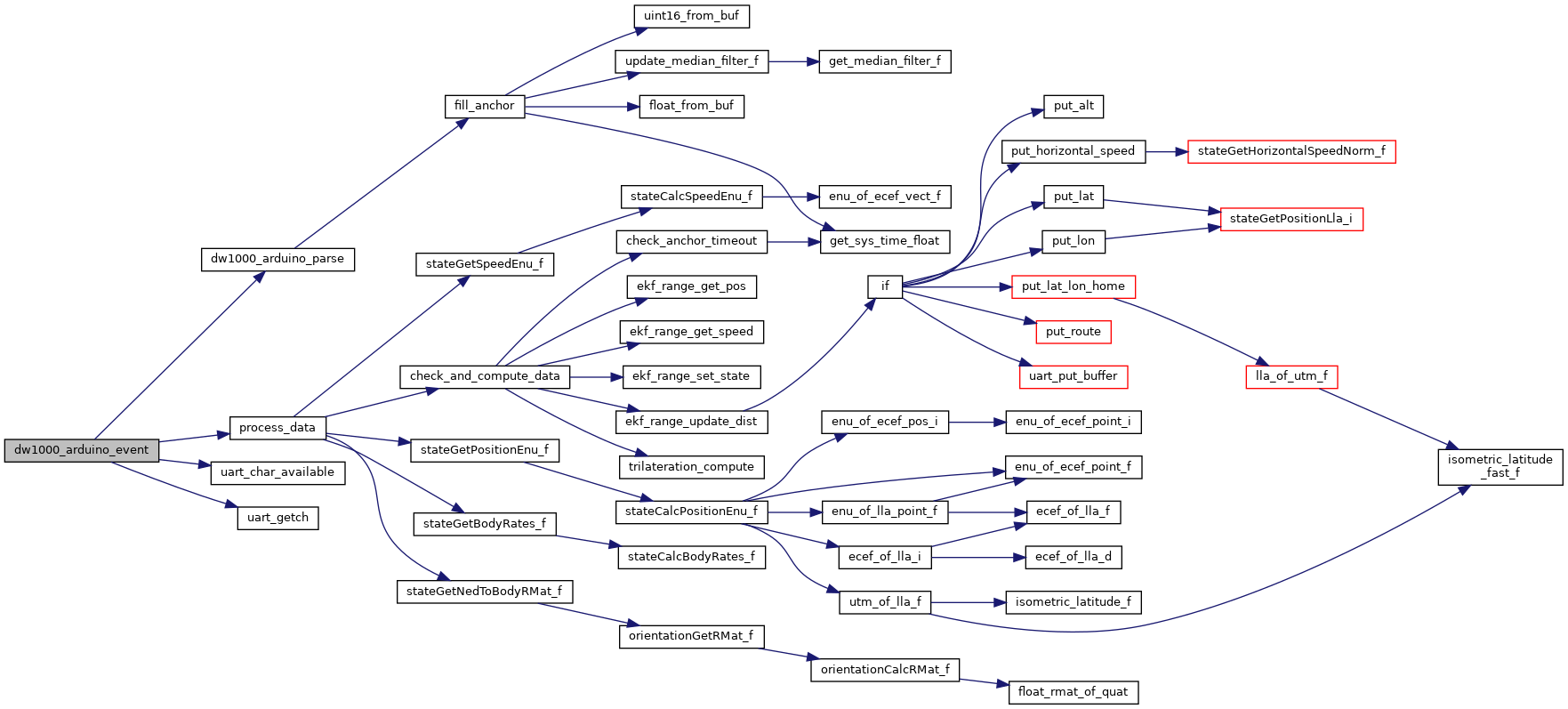
References dw1000, dw1000_arduino_parse(), foo, process_data(), uart_char_available(), and uart_getch().
Here is the call graph for this function:Definition at line 513 of file dw1000_arduino.c.
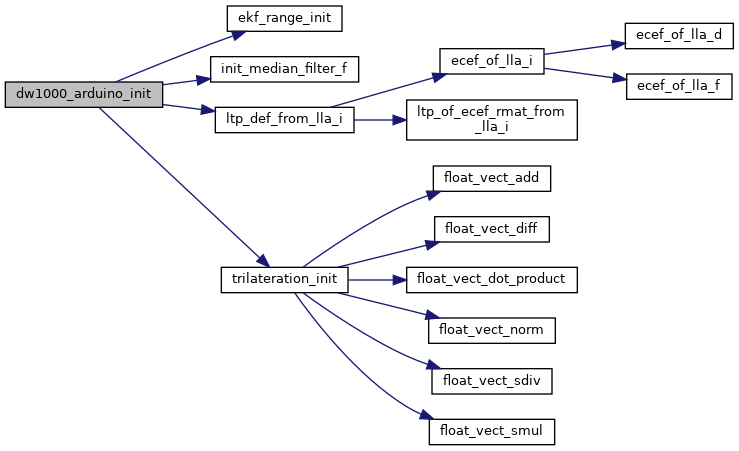
References DW1000::anchors, GpsState::cacc, DW1000::ck, GpsState::comp_id, Anchor::distance, dw1000, dw1000_ekf_q, dw1000_ekf_r_dist, dw1000_ekf_r_speed, DW1000_INITIAL_HEADING, DW1000_NB_ANCHORS, DW1000_USE_EKF, dw1000_use_ekf, DW_WAIT_STX, DW1000::ekf_range, ekf_range_init(), DW1000::ekf_running, GpsState::fix, foo, DW1000::gps_dw1000, GPS_DW1000_ID, GPS_FIX_NONE, Anchor::id, ids, DW1000::idx, init_median_filter_f(), DW1000::initial_heading, LlaCoor_i::lat, DW1000::ltp_def, ltp_def_from_lla_i(), DW1000::mf, GpsState::pacc, GpsState::pdop, DW1000::pos, Anchor::pos, pos_x, pos_y, pos_z, DW1000::raw_dist, GpsState::sacc, DW1000::speed, DW1000::state, Anchor::time, trilateration_init(), DW1000::updated, Anchor::updated, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
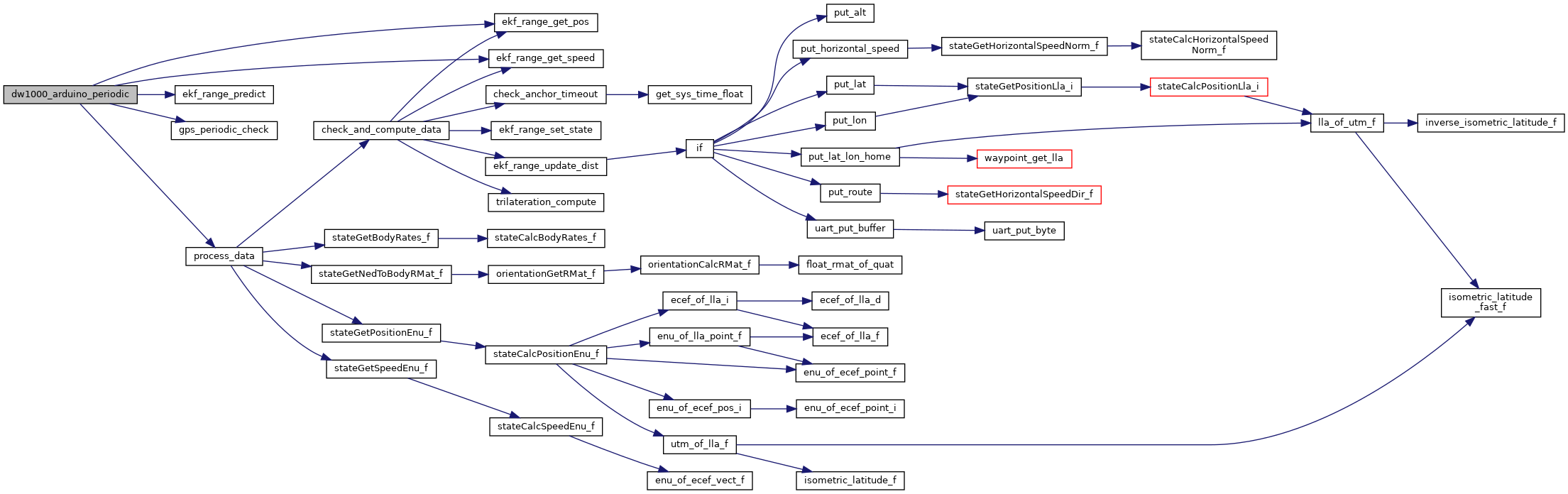
Here is the call graph for this function:Definition at line 568 of file dw1000_arduino.c.
References dw1000, dw1000_use_ekf, DW1000::ekf_range, ekf_range_get_pos(), ekf_range_get_speed(), ekf_range_predict(), DW1000::ekf_running, foo, DW1000::gps_dw1000, gps_periodic_check(), log_started, DW1000::pos, pprzLogFile, process_data(), and DW1000::speed.
Here is the call graph for this function:Definition at line 599 of file dw1000_arduino.c.
References DW1000::anchors, DefaultChannel, DefaultDevice, Anchor::distance, dw1000, foo, DW1000::pos, DW1000::raw_dist, DW1000::speed, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
settings handler
Definition at line 630 of file dw1000_arduino.c.
References dw1000, dw1000_ekf_q, dw1000_ekf_r_dist, dw1000_ekf_r_speed, DW1000::ekf_range, and ekf_range_update_noise().
Here is the call graph for this function:Definition at line 636 of file dw1000_arduino.c.
References dw1000, dw1000_ekf_q, dw1000_ekf_r_dist, dw1000_ekf_r_speed, DW1000::ekf_range, and ekf_range_update_noise().
Here is the call graph for this function:Definition at line 642 of file dw1000_arduino.c.
References dw1000, dw1000_ekf_q, dw1000_ekf_r_dist, dw1000_ekf_r_speed, DW1000::ekf_range, and ekf_range_update_noise().
Here is the call graph for this function:Reset reference heading to current heading AHRS/INS should be aligned before calling this function.
Definition at line 463 of file dw1000_arduino.c.
References dw1000, foo, DW1000::initial_heading, FloatEulers::psi, and stateGetNedToBodyEulers_f().
Here is the call graph for this function:
|
extern |
process and measurements noise
Definition at line 190 of file dw1000_arduino.c.
Referenced by dw1000_arduino_init(), dw1000_arduino_update_ekf_q(), dw1000_arduino_update_ekf_r_dist(), and dw1000_arduino_update_ekf_r_speed().
|
extern |
Definition at line 191 of file dw1000_arduino.c.
Referenced by dw1000_arduino_init(), dw1000_arduino_update_ekf_q(), dw1000_arduino_update_ekf_r_dist(), and dw1000_arduino_update_ekf_r_speed().
|
extern |
Definition at line 192 of file dw1000_arduino.c.
Referenced by dw1000_arduino_init(), dw1000_arduino_update_ekf_q(), dw1000_arduino_update_ekf_r_dist(), and dw1000_arduino_update_ekf_r_speed().
|
extern |
enable EKF filtering
Definition at line 189 of file dw1000_arduino.c.
Referenced by check_and_compute_data(), dw1000_arduino_init(), and dw1000_arduino_periodic().