|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Collective Tracking Control. More...
#include "std.h" Include dependency graph for ctc.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ctc.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ctc_con |
Functions | |
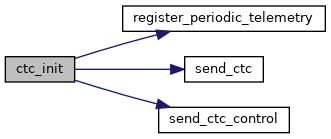
| void | ctc_init (void) |
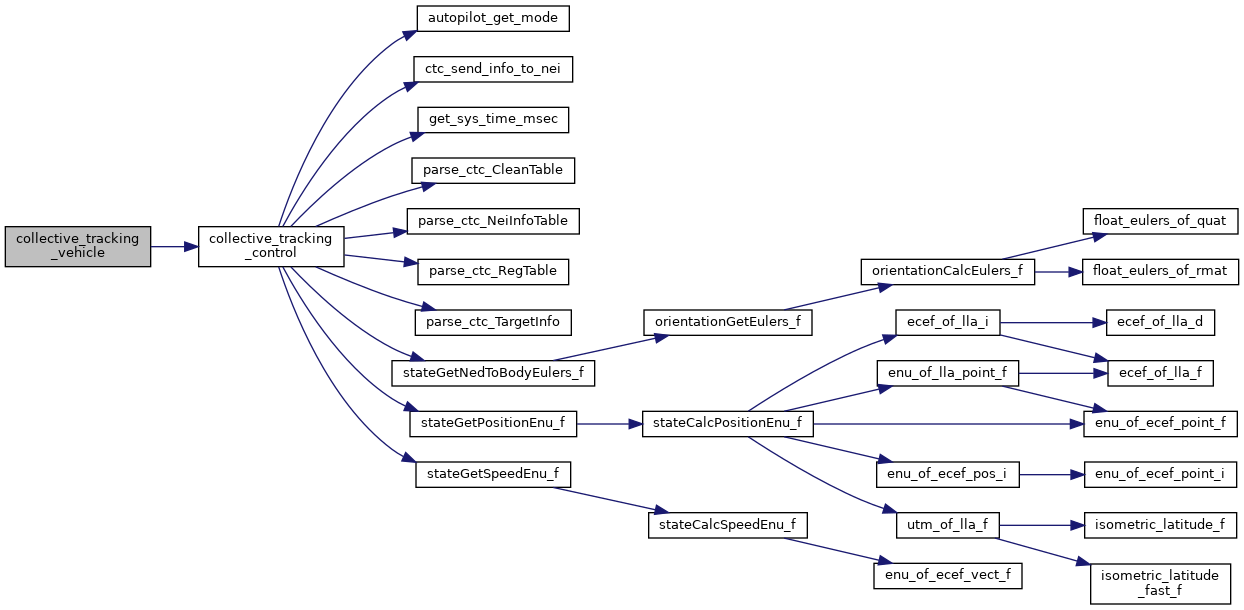
| bool | collective_tracking_vehicle (void) |
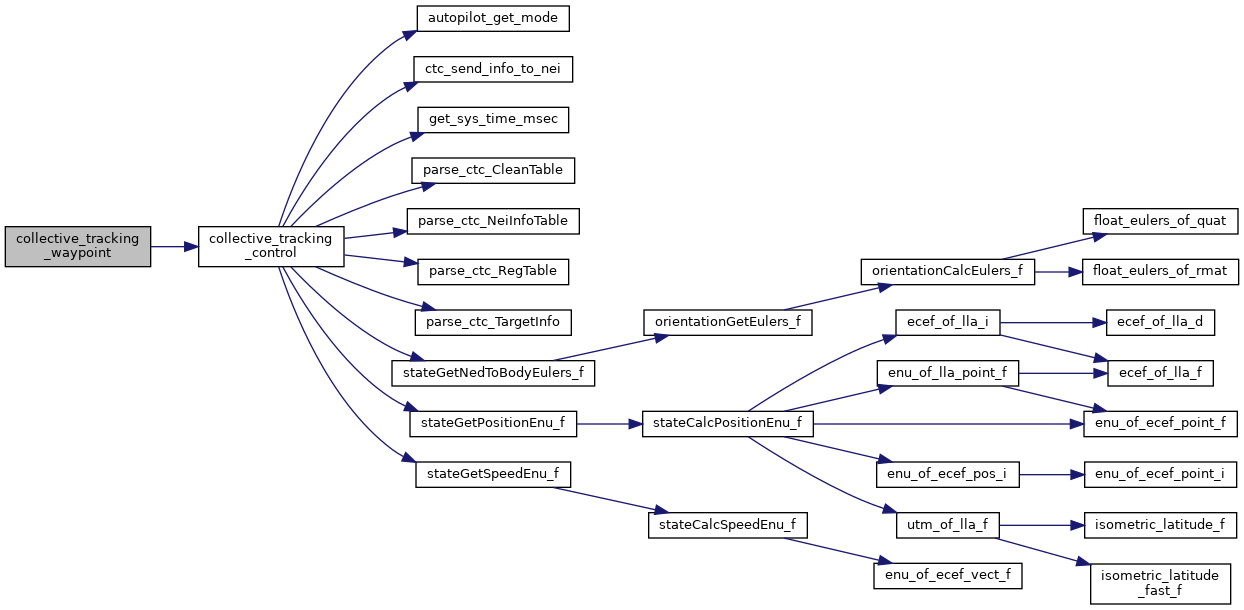
| bool | collective_tracking_waypoint (uint8_t wp) |
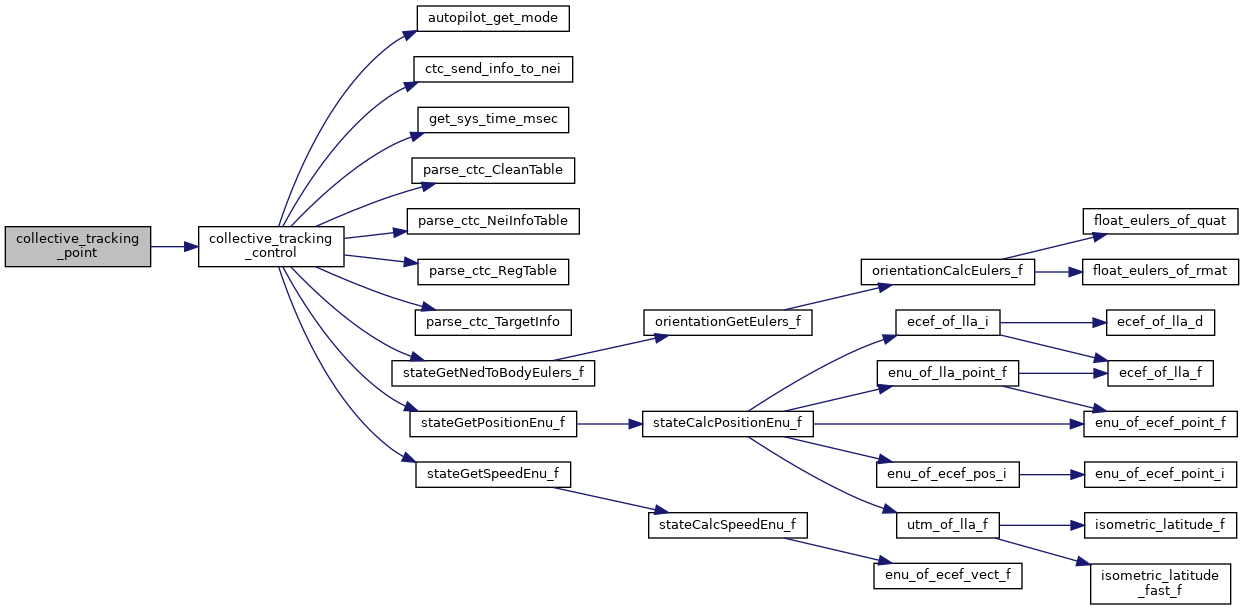
| bool | collective_tracking_point (float x, float y) |
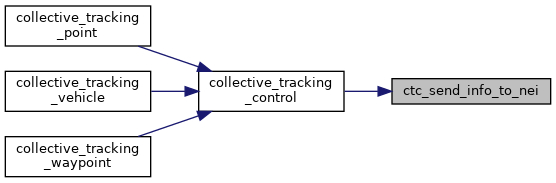
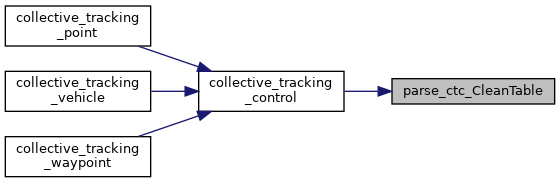
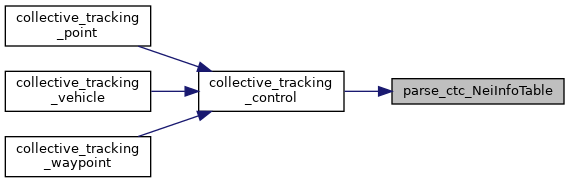
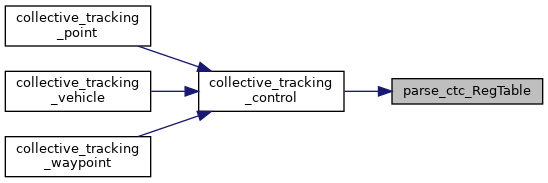
| void | collective_tracking_control (void) |
| void | ctc_send_info_to_nei (void) |
| void | parse_ctc_RegTable (uint8_t *buf) |
| void | parse_ctc_CleanTable (uint8_t *buf) |
| void | parse_ctc_NeiInfoTable (uint8_t *buf) |
| void | parse_ctc_TargetInfo (uint8_t *buf) |
Variables | |
| ctc_con | ctc_control |
| int16_t | tableNei [][6] |
| float | ctc_error_to_target |
Collective Tracking Control.
Definition in file ctc.h.
| struct ctc_con |
Definition at line 145 of file ctc.c.
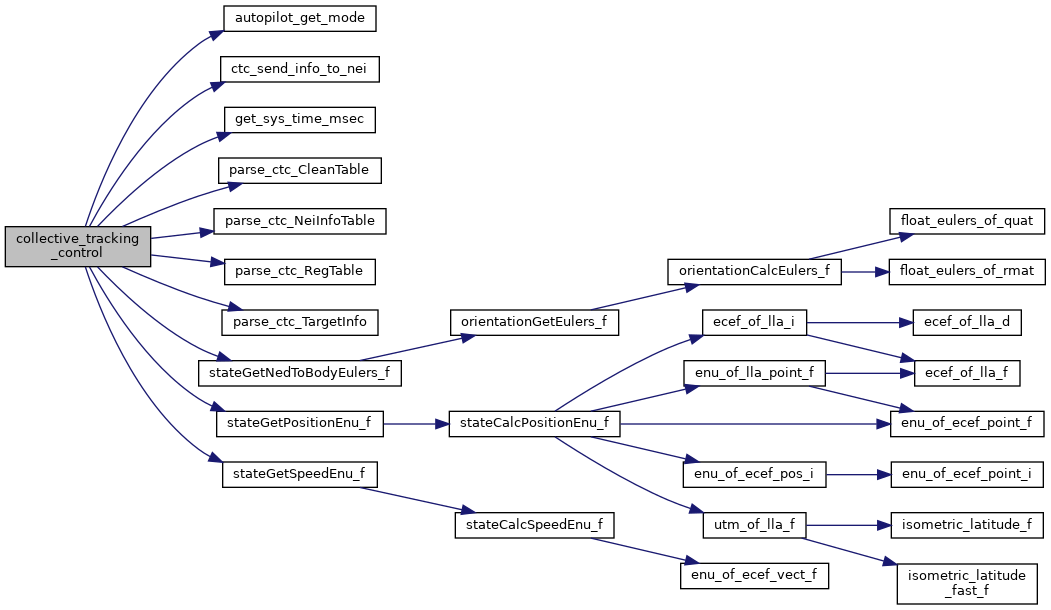
References ctc_con::alpha, AP_MODE_AUTO2, autopilot_get_mode(), before, ctc_control, ctc_first_time, ctc_gogo, CTC_MAX_AC, ctc_send_info_to_nei(), DefaultChannel, DefaultDevice, foo, get_sys_time_msec(), h_ctl_roll_max_setpoint, h_ctl_roll_setpoint, ctc_con::k1, ctc_con::k2, last_info, last_transmision, lateral_mode, LATERAL_MODE_ROLL, moving_target_px, moving_target_py, moving_target_vx, moving_target_vy, msg, ctc_con::omega, p, ctc_con::p_centroid_x, ctc_con::p_centroid_y, parse_ctc_CleanTable(), parse_ctc_NeiInfoTable(), parse_ctc_RegTable(), parse_ctc_TargetInfo(), ctc_con::px, ctc_con::py, ctc_con::ref_px, ctc_con::ref_py, starting_time, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), tableNei, ctc_con::target_px, ctc_con::target_py, ctc_con::target_vx, ctc_con::target_vy, FloatEulers::theta, ctc_con::time_broad, timeout, ctc_con::timeout, ctc_con::v_centroid_x, ctc_con::v_centroid_y, ctc_con::vx, ctc_con::vy, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by collective_tracking_point(), collective_tracking_vehicle(), and collective_tracking_waypoint().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 133 of file ctc.c.
References collective_tracking_control(), ctc_control, ctc_con::target_px, ctc_con::target_py, ctc_con::target_vx, and ctc_con::target_vy.
Here is the call graph for this function:Definition at line 109 of file ctc.c.
References collective_tracking_control(), ctc_control, moving_target_px, moving_target_py, moving_target_vx, moving_target_vy, ctc_con::target_px, ctc_con::target_py, ctc_con::target_vx, and ctc_con::target_vy.
Here is the call graph for this function:Definition at line 121 of file ctc.c.
References collective_tracking_control(), ctc_control, ctc_con::target_px, ctc_con::target_py, ctc_con::target_vx, ctc_con::target_vy, waypoints, point::x, and point::y.
Here is the call graph for this function:Definition at line 97 of file ctc.c.
References CTC_MAX_AC, DefaultPeriodic, foo, register_periodic_telemetry(), send_ctc(), send_ctc_control(), and tableNei.
Here is the call graph for this function:
|
extern |
Definition at line 77 of file ctc.c.
Referenced by collective_tracking_control(), collective_tracking_point(), collective_tracking_vehicle(), collective_tracking_waypoint(), and send_ctc_control().
|
extern |