|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
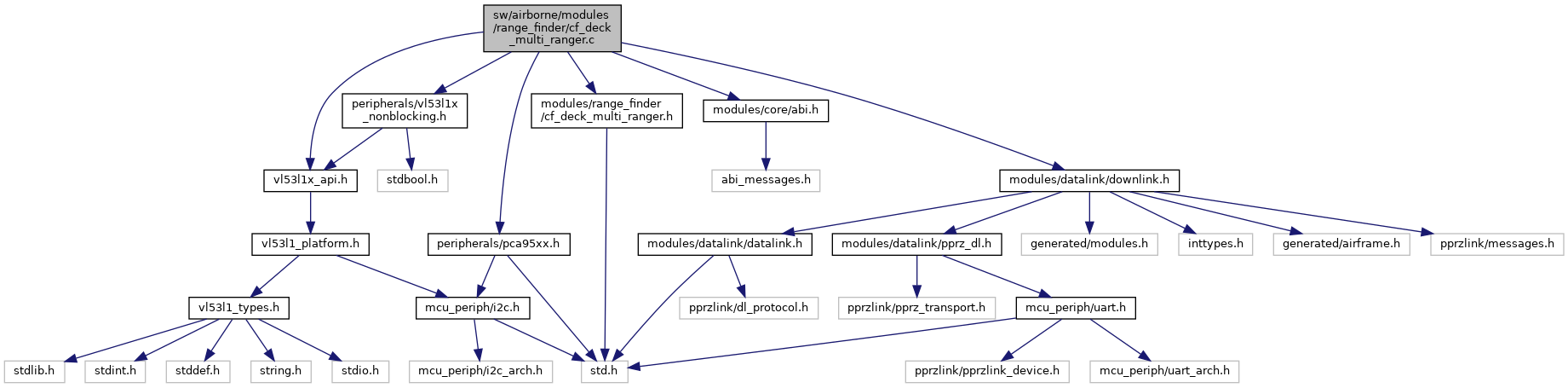
#include "modules/range_finder/cf_deck_multi_ranger.h"#include "peripherals/pca95xx.h"#include "peripherals/vl53l1x_nonblocking.h"#include "peripherals/vl53l1x_api.h"#include "modules/core/abi.h"#include "modules/datalink/downlink.h" Include dependency graph for cf_deck_multi_ranger.c:
Include dependency graph for cf_deck_multi_ranger.c:Go to the source code of this file.
Data Structures | |
| struct | SingleRanger |
| struct | cf_deck_multi_ranger |
Functions | |
| static void | multi_ranger_boot_device (VL53L1_Dev_t *dev UNUSED) |
| Boot a device. | |
| void | multi_ranger_init (void) |
| Module init. | |
| static bool | multi_ranger_read (struct SingleRanger *ranger UNUSED) |
| Read data from a device. | |
| void | multi_ranger_periodic (void) |
| Module periodic function. | |
| void | multi_ranger_event (void) |
| void | multi_ranger_report (void) |
Variables | |
| static const float | multi_ranger_array_orientation [][2] = MULTI_RANGER_ARRAY_ORIENTATION |
| static struct cf_deck_multi_ranger | multi_ranger |
Definition in file cf_deck_multi_ranger.c.
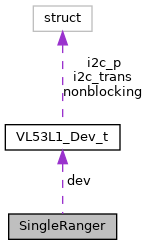
| struct SingleRanger |
Definition at line 107 of file cf_deck_multi_ranger.c.
Collaboration diagram for SingleRanger:| Data Fields | ||
|---|---|---|
| float | azimuth | azimuth [rad] relative to body frame |
| float | bearing | bearing [rad] relative to body frame |
| VL53L1_Dev_t | dev | sensor driver |
| float | distance | raw distance measurement |
| uint8_t | read_state | current reading state |
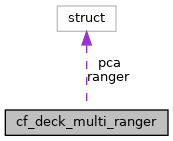
| struct cf_deck_multi_ranger |
Definition at line 115 of file cf_deck_multi_ranger.c.
Collaboration diagram for cf_deck_multi_ranger:| Data Fields | ||
|---|---|---|
| struct pca95xx | pca | |
| struct SingleRanger | ranger[MULTI_RANGER_NB] | sensor array |
| enum MultiRangerStatus | status | |
| #define MULTI_RANGER_ARRAY_ORIENTATION {{0.f, 0.f}, {0.f, M_PI}, {0.f, M_PI_2}, {0.f, -M_PI_2}, {M_PI_2, 0.f}} |
Definition at line 103 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_DISTANCEMODE 2 |
Definition at line 52 of file cf_deck_multi_ranger.c.
Definition at line 38 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_INTERMEASUREMENT_MS MULTI_RANGER_TIMINGBUDGET_MS |
Definition at line 60 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_ALL (MULTI_RANGER_PIN_FRONT | MULTI_RANGER_PIN_BACK | MULTI_RANGER_PIN_RIGHT | MULTI_RANGER_PIN_LEFT | MULTI_RANGER_PIN_UP) |
Definition at line 72 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_BACK PCA95XX_P1 |
Definition at line 68 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_FRONT PCA95XX_P4 |
Definition at line 67 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_LEFT PCA95XX_P6 |
Definition at line 70 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_RIGHT PCA95XX_P2 |
Definition at line 69 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_PIN_UP PCA95XX_P0 |
Definition at line 71 of file cf_deck_multi_ranger.c.
| #define MULTI_RANGER_TIMINGBUDGET_MS 100 |
Definition at line 46 of file cf_deck_multi_ranger.c.
| Enumerator | |
|---|---|
| MULTI_RANGER_FRONT | |
| MULTI_RANGER_BACK | |
| MULTI_RANGER_RIGHT | |
| MULTI_RANGER_LEFT | |
| MULTI_RANGER_UP | |
| MULTI_RANGER_NB | |
Definition at line 92 of file cf_deck_multi_ranger.c.
Definition at line 74 of file cf_deck_multi_ranger.c.
|
static |
Boot a device.
Definition at line 128 of file cf_deck_multi_ranger.c.
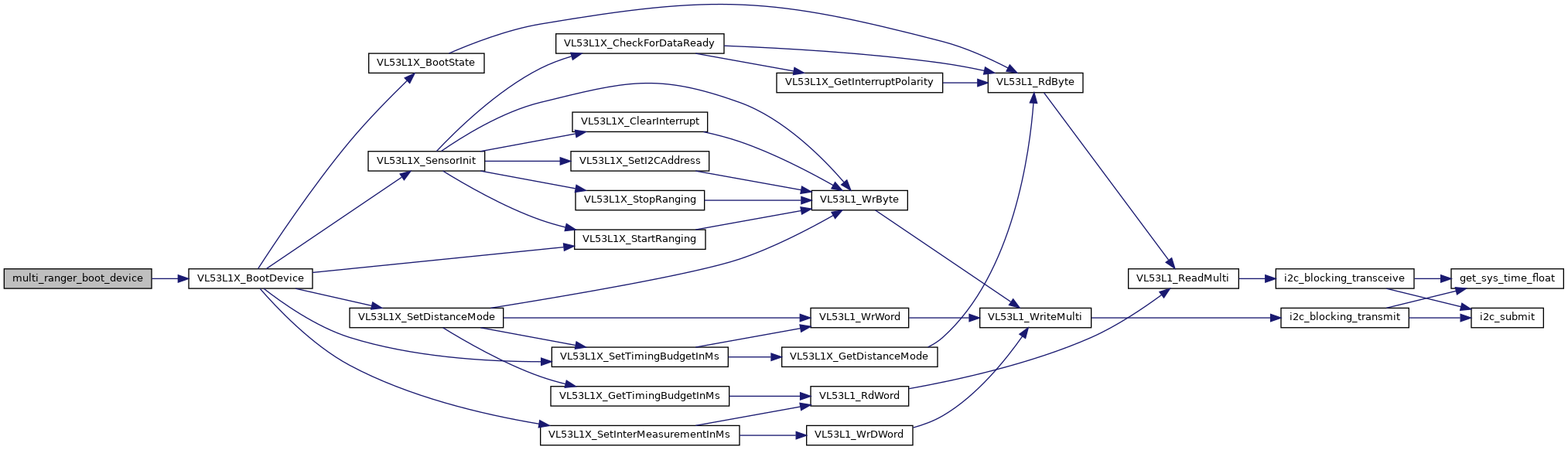
References dev, MULTI_RANGER_DISTANCEMODE, MULTI_RANGER_INTERMEASUREMENT_MS, MULTI_RANGER_TIMINGBUDGET_MS, and VL53L1X_BootDevice().
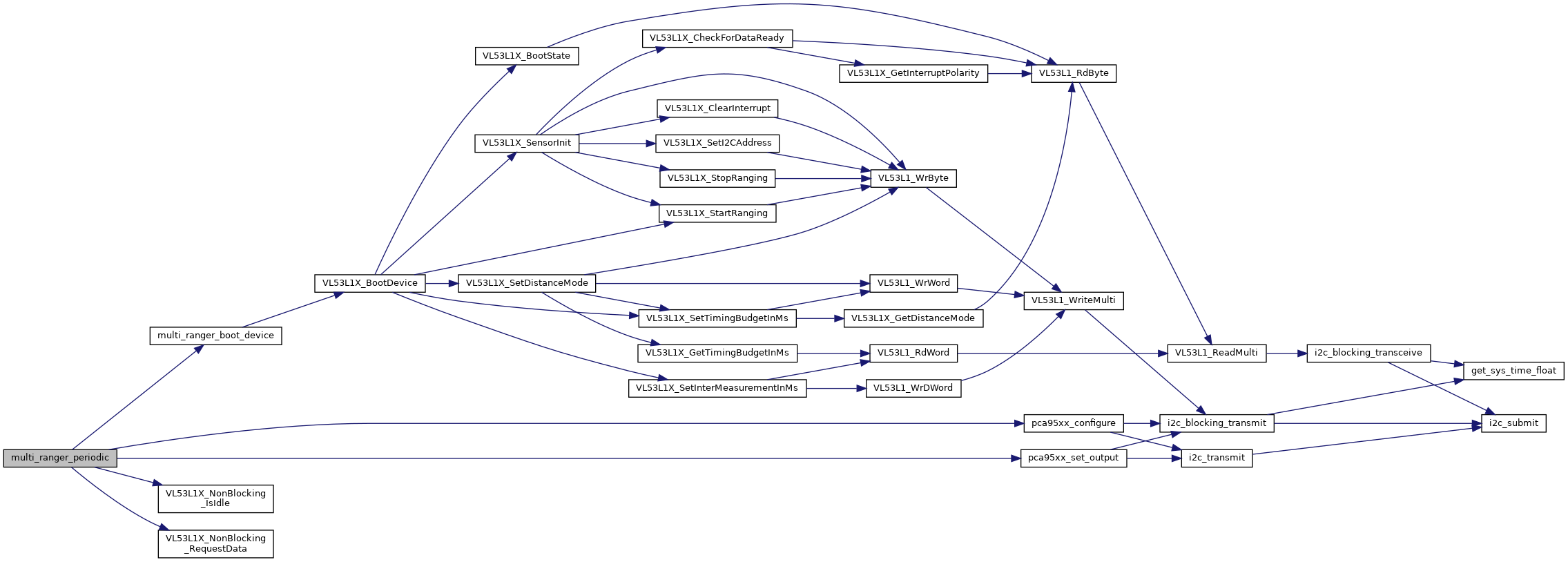
Referenced by multi_ranger_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 251 of file cf_deck_multi_ranger.c.
References multi_ranger, MULTI_RANGER_BACK, MULTI_RANGER_FRONT, MULTI_RANGER_LEFT, multi_ranger_read(), MULTI_RANGER_RIGHT, MULTI_RANGER_UP, and cf_deck_multi_ranger::ranger.
Here is the call graph for this function:Module init.
Definition at line 138 of file cf_deck_multi_ranger.c.
References SingleRanger::azimuth, SingleRanger::bearing, SingleRanger::dev, SingleRanger::distance, foo, VL53L1_Dev_t::i2c_p, VL53L1_Dev_t::i2c_trans, multi_ranger, multi_ranger_array_orientation, MULTI_RANGER_NB, MULTI_RANGER_PIN_ALL, MULTI_RANGER_UNINIT, cf_deck_multi_ranger::pca, pca95xx_configure(), PCA95XX_DEFAULT_ADDRESS, pca95xx_init(), pca95xx_set_output(), cf_deck_multi_ranger::ranger, VL53L1_Dev_t::read_status, i2c_transaction::slave_addr, cf_deck_multi_ranger::status, VL53L1_DEFAULT_ADDRESS, and VL53L1_READ_IDLE.
Here is the call graph for this function:Module periodic function.
Definition at line 181 of file cf_deck_multi_ranger.c.
References SingleRanger::dev, multi_ranger, MULTI_RANGER_BACK, multi_ranger_boot_device(), MULTI_RANGER_CONF_BACK, MULTI_RANGER_CONF_FRONT, MULTI_RANGER_CONF_IO, MULTI_RANGER_CONF_LEFT, MULTI_RANGER_CONF_RIGHT, MULTI_RANGER_CONF_UP, MULTI_RANGER_FRONT, MULTI_RANGER_LEFT, MULTI_RANGER_PIN_ALL, MULTI_RANGER_PIN_BACK, MULTI_RANGER_PIN_FRONT, MULTI_RANGER_PIN_LEFT, MULTI_RANGER_PIN_RIGHT, MULTI_RANGER_READ_BACK, MULTI_RANGER_READ_FRONT, MULTI_RANGER_READ_LEFT, MULTI_RANGER_READ_RIGHT, MULTI_RANGER_READ_UP, MULTI_RANGER_RIGHT, MULTI_RANGER_UNINIT, MULTI_RANGER_UP, cf_deck_multi_ranger::pca, pca95xx_configure(), pca95xx_set_output(), cf_deck_multi_ranger::ranger, cf_deck_multi_ranger::status, VL53L1X_NonBlocking_IsIdle(), and VL53L1X_NonBlocking_RequestData().
Here is the call graph for this function:
|
static |
Read data from a device.
Definition at line 164 of file cf_deck_multi_ranger.c.
References SingleRanger::azimuth, SingleRanger::bearing, SingleRanger::dev, SingleRanger::distance, foo, OBS_DETECTION_MULTI_RANGER_DECK_ID, cf_deck_multi_ranger::ranger, and VL53L1X_NonBlocking_ReadDataEvent().
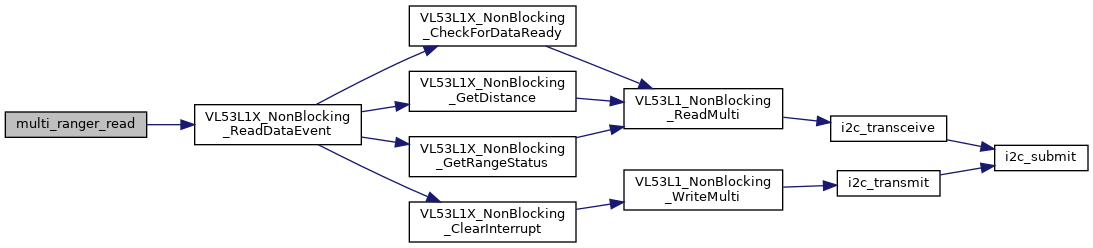
Referenced by multi_ranger_event().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 261 of file cf_deck_multi_ranger.c.
References DefaultChannel, DefaultDevice, SingleRanger::distance, foo, multi_ranger, MULTI_RANGER_NB, and cf_deck_multi_ranger::ranger.
|
static |
Definition at line 123 of file cf_deck_multi_ranger.c.
Referenced by multi_ranger_event(), multi_ranger_init(), multi_ranger_periodic(), and multi_ranger_report().
|
static |
Definition at line 105 of file cf_deck_multi_ranger.c.
Referenced by multi_ranger_init().