|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Pan/Tilt camera library. More...
#include <math.h>#include "cam.h"#include "modules/nav/common_nav.h"#include "autopilot.h"#include "generated/flight_plan.h"#include "state.h"#include "modules/datalink/telemetry.h" Include dependency graph for cam.c:
Include dependency graph for cam.c:Go to the source code of this file.
Macros | |
| #define | CAM_PAN0 RadOfDeg(0) |
| #define | CAM_TILT0 RadOfDeg(0) |
| #define | CAM_MODE0 CAM_MODE_OFF |
Functions | |
| void | cam_nadir (void) |
| Point straight down. | |
| void | cam_angles (void) |
| Computes the servo values from cam_pan_c and cam_tilt_c. | |
| void | cam_target (void) |
| Computes the right angles from target_x, target_y, target_alt. | |
| void | cam_waypoint_target (void) |
| void | cam_ac_target (void) |
| static void | send_cam (struct transport_tx *trans, struct link_device *dev) |
| void | cam_init (void) |
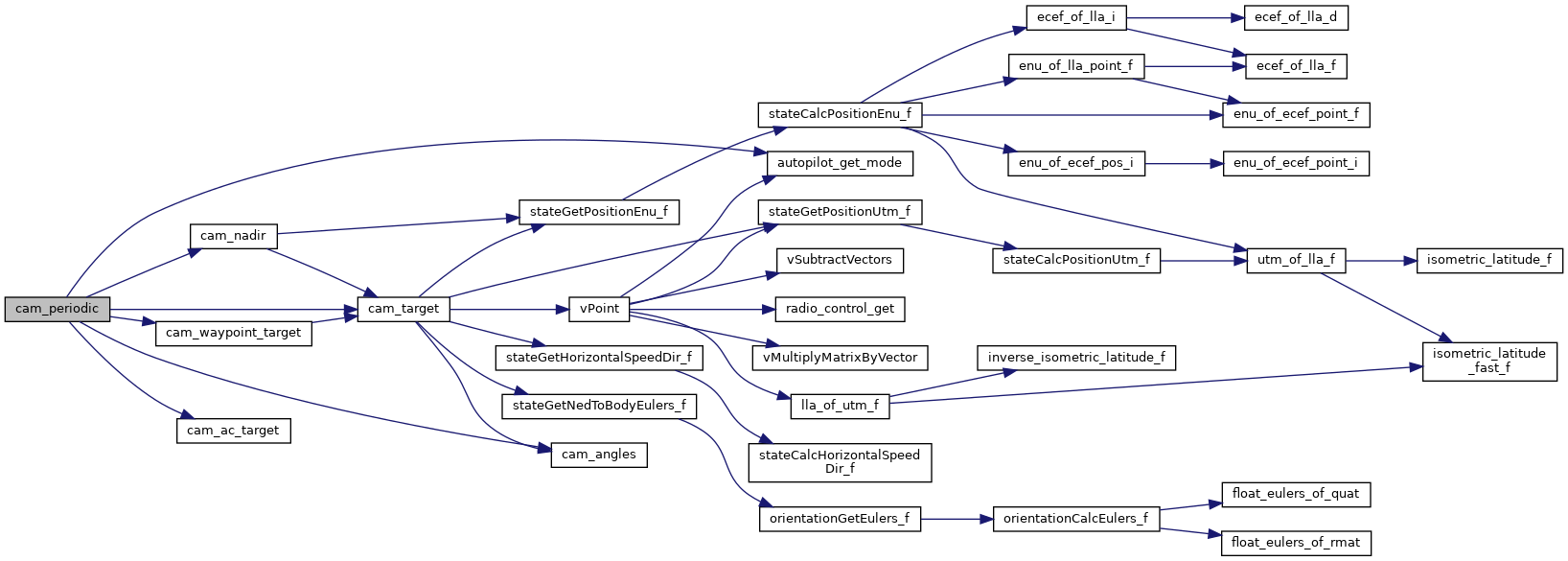
| void | cam_periodic (void) |
| For CAM_MODE_AC_TARGET mode. | |
Variables | |
| float | cam_pan_c |
| float | cam_tilt_c |
| float | cam_phi_c |
| float | cam_theta_c |
| float | cam_target_x |
| Radians, for CAM_MODE_ANGLES mode. | |
| float | cam_target_y |
| float | cam_target_alt |
| uint8_t | cam_target_wp |
| For CAM_MODE_XY_TARGET mode. | |
| uint8_t | cam_target_ac |
| For CAM_MODE_WP_TARGET mode. | |
| uint8_t | cam_mode |
| bool | cam_lock |
| int16_t | cam_pan_command |
| int16_t | cam_tilt_command |
Pan/Tilt camera library.
Definition in file cam.c.
| #define CAM_MODE0 CAM_MODE_OFF |
Definition at line 317 of file cam.c.
Referenced by cam_periodic().
Here is the caller graph for this function:Computes the servo values from cam_pan_c and cam_tilt_c.
Definition at line 203 of file cam.c.
References cam_pan_c, CAM_PAN_MAX, CAM_PAN_MIN, cam_phi_c, cam_theta_c, cam_tilt_c, CAM_TILT_MAX, CAM_TILT_MIN, foo, MAX_PPRZ, MIN_PPRZ, and TRIM_PPRZ.
Referenced by cam_periodic(), cam_target(), and state2stereocam().
Here is the caller graph for this function:Definition at line 119 of file cam.c.
References cam_mode, CAM_MODE0, DefaultPeriodic, foo, register_periodic_telemetry(), and send_cam().
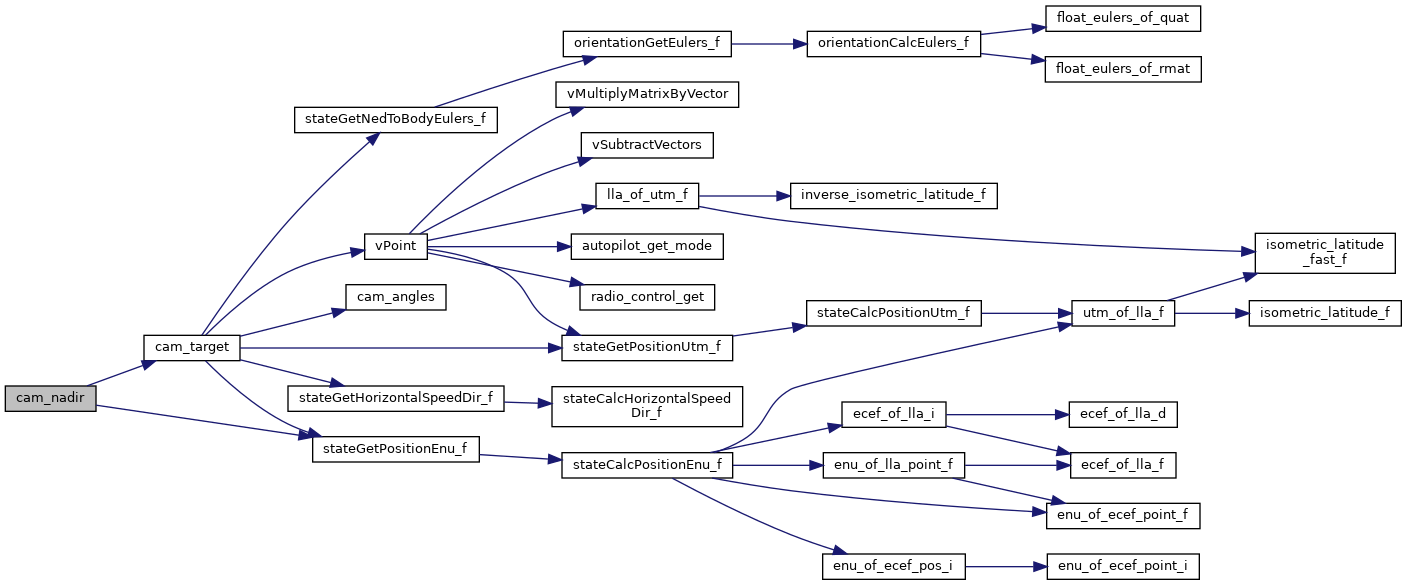
Here is the call graph for this function:Point straight down.
Definition at line 280 of file cam.c.
References cam_target(), cam_target_alt, cam_target_x, cam_target_y, foo, stateGetPositionEnu_f(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by cam_periodic().
Here is the call graph for this function: Here is the caller graph for this function:For CAM_MODE_AC_TARGET mode.
Definition at line 129 of file cam.c.
References AP_MODE_AUTO1, AP_MODE_AUTO2, autopilot_get_mode(), cam_ac_target(), cam_angles(), cam_mode, CAM_MODE_AC_TARGET, CAM_MODE_ANGLES, CAM_MODE_NADIR, CAM_MODE_OFF, CAM_MODE_RC, CAM_MODE_STABILIZED, CAM_MODE_WP_TARGET, CAM_MODE_XY_TARGET, cam_nadir(), CAM_PAN0, cam_pan_c, cam_target(), CAM_TILT0, cam_tilt_c, cam_waypoint_target(), foo, LED_OFF, LED_ON, MAX_PPRZ, and MIN_PPRZ.
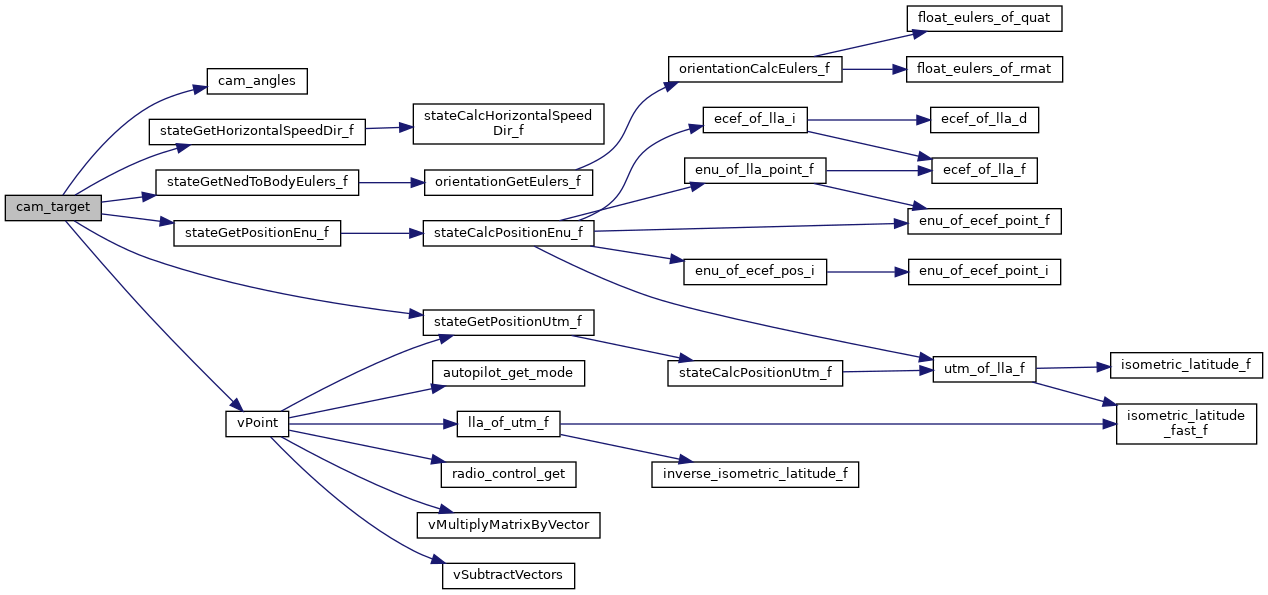
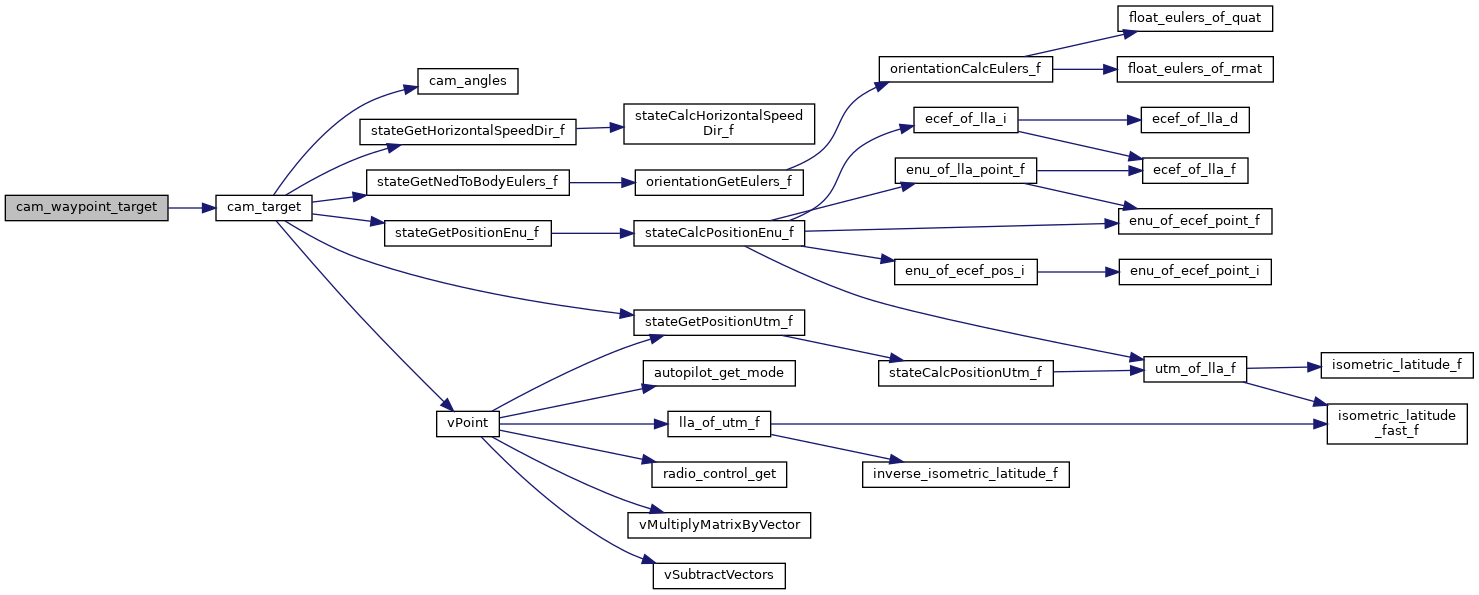
Here is the call graph for this function:Computes the right angles from target_x, target_y, target_alt.
Definition at line 261 of file cam.c.
References cam_angles(), cam_pan_c, cam_target_alt, cam_target_x, cam_target_y, cam_tilt_c, foo, FloatEulers::phi, stateGetHorizontalSpeedDir_f(), stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), stateGetPositionUtm_f(), FloatEulers::theta, vPoint(), EnuCoor_f::x, and EnuCoor_f::y.
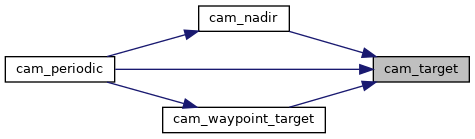
Referenced by cam_nadir(), cam_periodic(), and cam_waypoint_target().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 295 of file cam.c.
References cam_target(), cam_target_alt, cam_target_wp, cam_target_x, cam_target_y, ground_alt, nb_waypoint, WaypointX, and WaypointY.
Referenced by cam_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 102 of file cam.c.
References cam_phi_c, cam_target_x, cam_target_y, cam_theta_c, dev, and foo.
Referenced by cam_init().
Here is the caller graph for this function:| uint8_t cam_mode |
Definition at line 90 of file cam.c.
Referenced by cam_init(), cam_periodic(), cam_segment_periodic(), cam_segment_stop(), and vPoint().
| float cam_pan_c |
Definition at line 72 of file cam.c.
Referenced by cam_angles(), cam_periodic(), and cam_target().
| float cam_phi_c |
Definition at line 80 of file cam.c.
Referenced by cam_angles(), and send_cam().
| float cam_target_alt |
Definition at line 83 of file cam.c.
Referenced by cam_nadir(), cam_segment_periodic(), cam_target(), and cam_waypoint_target().
| uint8_t cam_target_wp |
For CAM_MODE_XY_TARGET mode.
Definition at line 84 of file cam.c.
Referenced by cam_waypoint_target().
| float cam_target_x |
Radians, for CAM_MODE_ANGLES mode.
Definition at line 83 of file cam.c.
Referenced by cam_nadir(), cam_segment_periodic(), cam_target(), cam_waypoint_target(), and send_cam().
| float cam_target_y |
Definition at line 83 of file cam.c.
Referenced by cam_nadir(), cam_segment_periodic(), cam_target(), cam_waypoint_target(), and send_cam().
| float cam_theta_c |
Definition at line 81 of file cam.c.
Referenced by cam_angles(), and send_cam().
| float cam_tilt_c |
Definition at line 78 of file cam.c.
Referenced by cam_angles(), cam_periodic(), and cam_target().