|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Finds corners in an image by actively scanning the image. More...
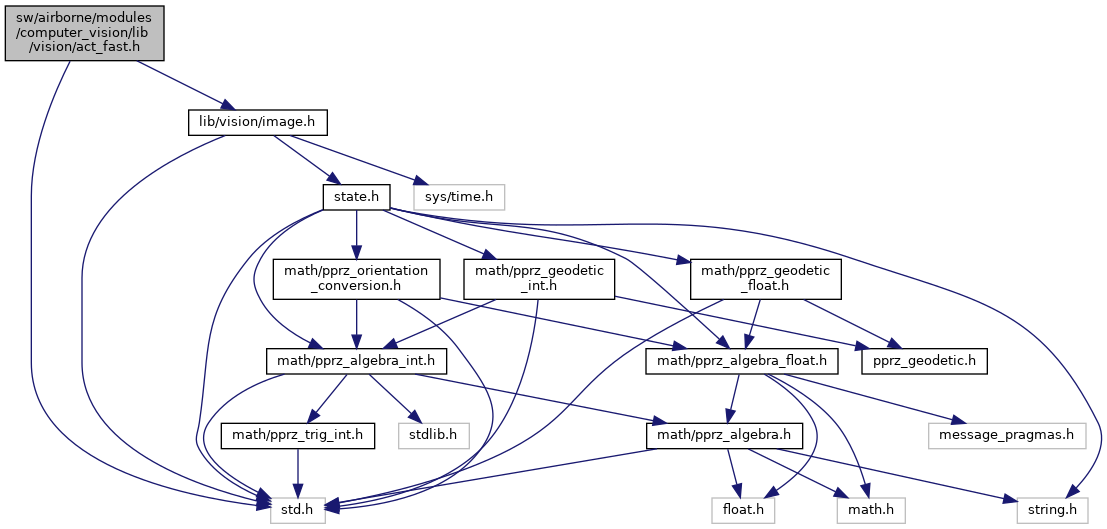
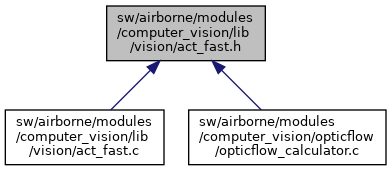
 Include dependency graph for act_fast.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for act_fast.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | agent_t |
Functions | |
| void | act_fast (struct image_t *img, uint8_t fast_threshold, uint16_t *num_corners, struct point_t **ret_corners, uint16_t n_agents, uint16_t n_time_steps, float long_step, float short_step, int min_gradient, int gradient_method, int camera_id) |
| Do an ACT-FAST corner detection. | |
Finds corners in an image by actively scanning the image.
This method is inspired by the work in: de Croon, G.C.H.E., and Nolfi, S. (2013, May). Act-corner: Active corner finding for optic flow determination. In Robotics and Automation (ICRA), 2013 IEEE International Conference on (pp. 4679-4684). IEEE.
The main idea of this particular implementation, called ACT-FAST, is that actively scanning the image allows to:
For bigger images (e.g., 640 x 640), the computational advantage of ACT-FAST over the normal, exhaustive application of FAST becomes significant (in the order of a factor > 10).
The code here is part of the following publication: de Croon, G.C.H.E. "ACT-FAST: efficiently finding corners by actively exploring images.", in submission.
Definition in file act_fast.h.
| struct agent_t |
| void act_fast | ( | struct image_t * | img, |
| uint8_t | fast_threshold, | ||
| uint16_t * | num_corners, | ||
| struct point_t ** | ret_corners, | ||
| uint16_t | n_agents, | ||
| uint16_t | n_time_steps, | ||
| float | long_step, | ||
| float | short_step, | ||
| int | min_gradient, | ||
| int | gradient_method, | ||
| int | camera_id | ||
| ) |
Do an ACT-FAST corner detection.
| [in] | *img | The image to do the corner detection on |
| [in] | threshold | The threshold which we use for FAST9 |
| [in] | *num_corners | reference to the amount of corners found, set by this function |
| [in] | **ret_corners | pointer to the array which contains the corners that were detected. |
| [in] | n_agents | The number of agents that will scan the image for corners |
| [in] | n_time_steps | The maximum number of time steps allowed for scanning |
| [in] | long_step | When there is not enough texture, the agent will take a long step to a next point of this length in pixels |
| [in] | short_step | When there is texture, the agent will follow the edge with this short step in pixels |
| [in] | min_gradient | The minimum gradient, in order to determine when to take a long or short step |
| [in] | gradient_method | 0 = simple {-1, 0, 1}, 1 = Sobel {-1,0,1,-2,0,2,-1,0,1} |
Definition at line 58 of file act_fast.c.
References agent_t::active, agents, fast9_detect_pixel(), FAST9_MAX_CAMERAS, foo, image_gradient_pixel(), MAX_AGENTS, n_agents, n_time_steps, agent_t::preferred_dir_x, agent_t::preferred_dir_y, agent_t::x, point_t::x, agent_t::y, and point_t::y.
Referenced by calc_fast9_lukas_kanade().
Here is the call graph for this function: Here is the caller graph for this function: