|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
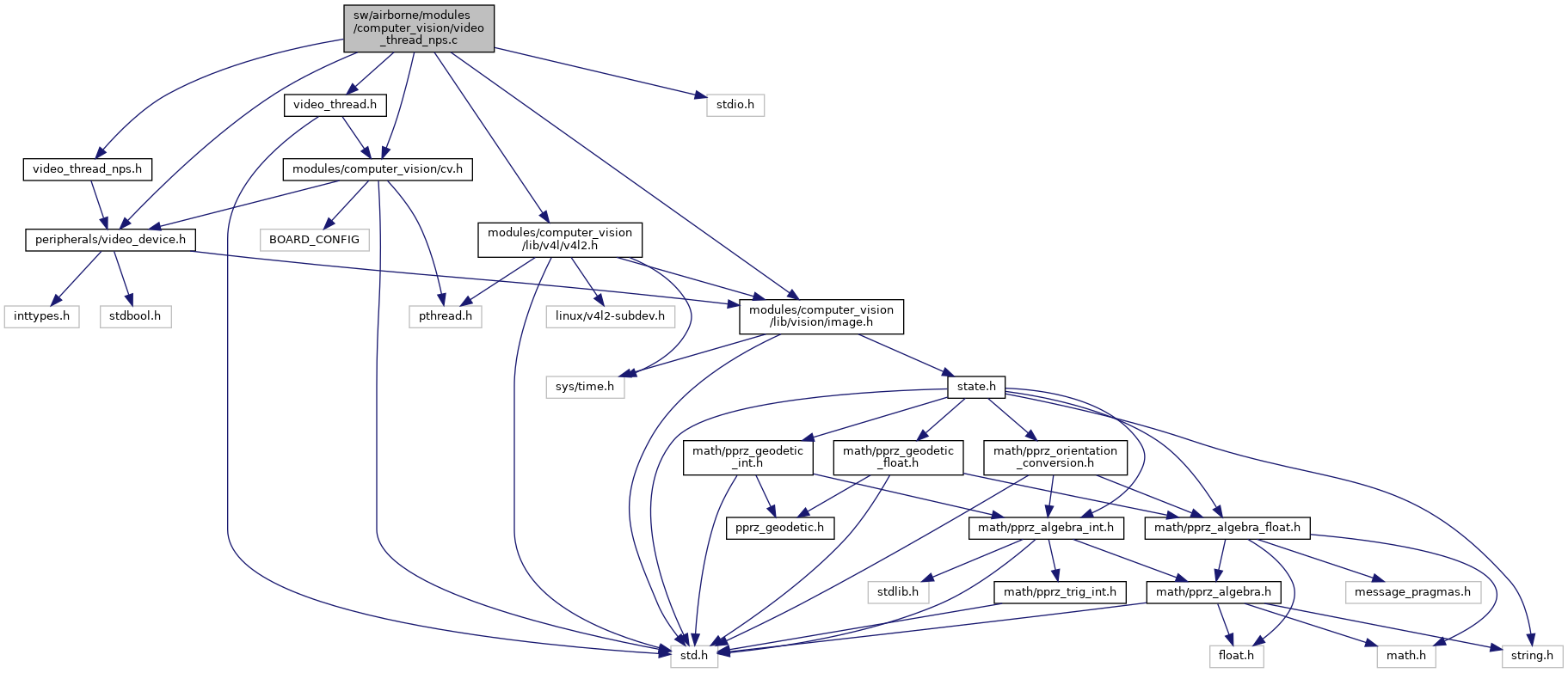
#include "video_thread_nps.h"#include "video_thread.h"#include "cv.h"#include "lib/vision/image.h"#include "modules/computer_vision/lib/v4l/v4l2.h"#include "peripherals/video_device.h"#include <stdio.h> Include dependency graph for video_thread_nps.c:
Include dependency graph for video_thread_nps.c:Go to the source code of this file.
Functions | |
| void | video_thread_init (void) |
| Initialize the view video. | |
| void | video_thread_periodic (void) |
| A dummy for now. | |
| void | video_thread_start (void) |
| Starts the streaming of a all cameras. | |
| void | video_thread_stop (void) |
| Stops the streaming of all cameras This could take some time, because the thread is stopped asynchronous. | |
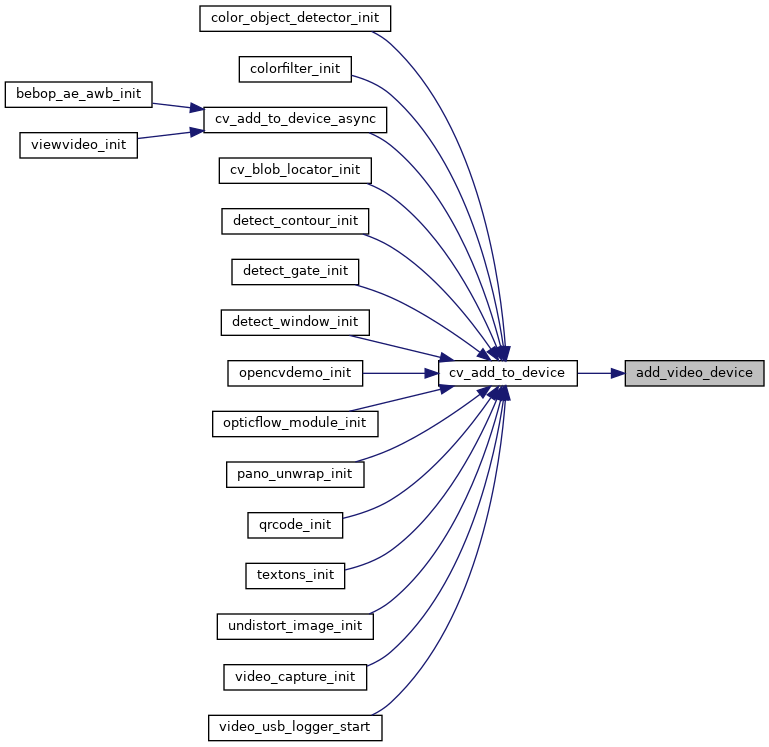
| bool | add_video_device (struct video_config_t *device) |
| Keep track of video devices added by modules. | |
Variables | |
| struct video_config_t | front_camera |
| Video thread dummy for simulation. | |
| struct video_config_t | bottom_camera |
| struct video_config_t * | cameras [VIDEO_THREAD_MAX_CAMERAS] = { NULL } |
| bool add_video_device | ( | struct video_config_t * | device | ) |
Keep track of video devices added by modules.
Definition at line 105 of file video_thread_nps.c.
References cameras, cameras, video_config_t::dev_name, foo, initialize_camera(), printf_debug, and VIDEO_THREAD_MAX_CAMERAS.
Referenced by cv_add_to_device().
Here is the call graph for this function: Here is the caller graph for this function:Initialize the view video.
Definition at line 87 of file video_thread_nps.c.
A dummy for now.
Definition at line 90 of file video_thread_nps.c.
Starts the streaming of a all cameras.
Definition at line 95 of file video_thread_nps.c.
Stops the streaming of all cameras This could take some time, because the thread is stopped asynchronous.
Definition at line 98 of file video_thread_nps.c.
| struct video_config_t bottom_camera |
Definition at line 63 of file video_thread_nps.c.
| struct video_config_t* cameras[VIDEO_THREAD_MAX_CAMERAS] = { NULL } |
Definition at line 84 of file video_thread_nps.c.
Referenced by add_video_device().
| struct video_config_t front_camera |
Video thread dummy for simulation.
Definition at line 43 of file video_thread_nps.c.