|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
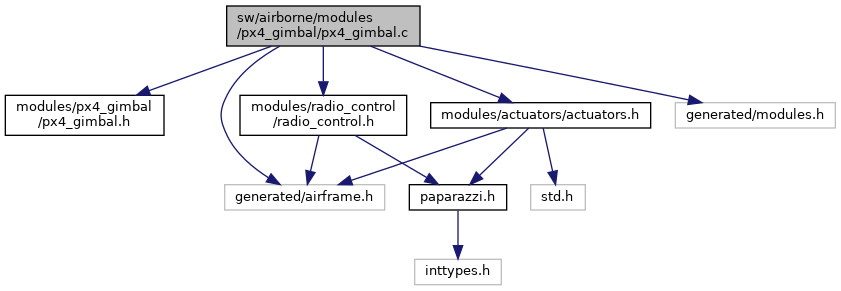
#include "modules/px4_gimbal/px4_gimbal.h"#include "modules/radio_control/radio_control.h"#include "generated/modules.h"#include "generated/airframe.h"#include "modules/actuators/actuators.h" Include dependency graph for px4_gimbal.c:
Include dependency graph for px4_gimbal.c:Go to the source code of this file.
Macros | |
| #define | PX4_GIMBAL_PWM_CHAN 0 |
| #define | PX4_GIMBAL_RC_CHAN RADIO_AUX2 |
| #define | PX4_GIMBAL_PWM_MIN 900 |
| #define | PX4_GIMBAL_PWM_MAX 1500 |
Functions | |
| void | px4_gimbal_init () |
| void | px4_set_gimbal_angle_periodic () |
Definition in file px4_gimbal.c.
| #define PX4_GIMBAL_PWM_CHAN 0 |
Definition at line 21 of file px4_gimbal.c.
| #define PX4_GIMBAL_PWM_MAX 1500 |
Definition at line 32 of file px4_gimbal.c.
| #define PX4_GIMBAL_PWM_MIN 900 |
Definition at line 28 of file px4_gimbal.c.
| #define PX4_GIMBAL_RC_CHAN RADIO_AUX2 |
Definition at line 24 of file px4_gimbal.c.
Definition at line 36 of file px4_gimbal.c.
References actuators_init().
Here is the call graph for this function:Definition at line 42 of file px4_gimbal.c.
References ActuatorPwmSet, foo, MAX_PPRZ, PX4_GIMBAL_PWM_CHAN, PX4_GIMBAL_PWM_MAX, PX4_GIMBAL_PWM_MIN, PX4_GIMBAL_RC_CHAN, radio_control, and RadioControl::values.