|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Flight Dynamics Model (FDM) for NPS using Gazebo. More...
#include <cstdio>#include <cstdlib>#include <string>#include <iostream>#include <sys/time.h>#include <gazebo/gazebo.hh>#include <gazebo/physics/physics.hh>#include <gazebo/sensors/sensors.hh>#include <sdf/sdf.hh>#include <gazebo/gazebo_config.h>#include "nps_fdm.h"#include "nps_autopilot.h"#include "generated/airframe.h"#include "generated/flight_plan.h"#include "autopilot.h"#include "modules/core/abi.h"#include "math/pprz_isa.h"#include "math/pprz_algebra_double.h"#include "filters/low_pass_filter.h"#include "filters/high_pass_filter.h"#include "modules/actuators/motor_mixing_types.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_geodetic_double.h"#include "state.h" Include dependency graph for nps_fdm_gazebo.cpp:
Include dependency graph for nps_fdm_gazebo.cpp:Go to the source code of this file.
Data Structures | |
| struct | gazebo_actuators_t |
Macros | |
| #define | NPS_GAZEBO_WORLD "empty.world" |
| #define | NPS_GAZEBO_AC_NAME "ardrone" |
Variables | |
| struct gazebo_actuators_t | gazebo_actuators = { NPS_ACTUATOR_NAMES, NPS_ACTUATOR_THRUSTS, NPS_ACTUATOR_TORQUES, { }, { }, { }} |
| std::shared_ptr< gazebo::sensors::SonarSensor > | sonar = NULL |
| struct NpsFdm | fdm |
| Holds all necessary NPS FDM state information. | |
| static bool | gazebo_initialized = false |
| static gazebo::physics::ModelPtr | model = NULL |
| static gazebo::sensors::ContactSensorPtr | ct |
Flight Dynamics Model (FDM) for NPS using Gazebo.
This is an FDM for NPS that uses Gazebo as the simulation engine.
Definition in file nps_fdm_gazebo.cpp.
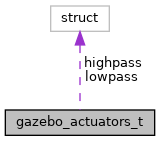
| struct gazebo_actuators_t |
Definition at line 114 of file nps_fdm_gazebo.cpp.
Collaboration diagram for gazebo_actuators_t:| Data Fields | ||
|---|---|---|
| struct FirstOrderHighPass | highpass[NPS_COMMANDS_NB] | |
| struct FirstOrderLowPass | lowpass[NPS_COMMANDS_NB] | |
| double | max_ang_momentum[NPS_COMMANDS_NB] | |
| string | names[NPS_COMMANDS_NB] | |
| double | thrusts[NPS_COMMANDS_NB] | |
| double | torques[NPS_COMMANDS_NB] | |
| #define NPS_GAZEBO_AC_NAME "ardrone" |
Definition at line 79 of file nps_fdm_gazebo.cpp.
| #define NPS_GAZEBO_WORLD "empty.world" |
Definition at line 76 of file nps_fdm_gazebo.cpp.
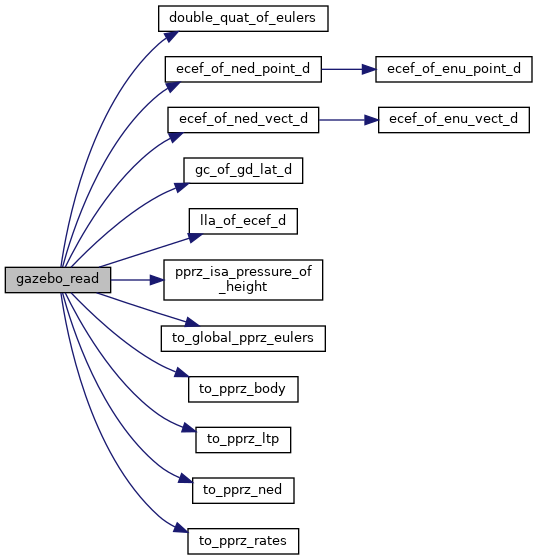
Read Gazebo's simulation state and store the results in the fdm struct used by NPS.
Not all fields are filled at the moment, as some of them are unused by paparazzi (see comments) and others are not available in Gazebo 7 (atmosphere).
Definition at line 509 of file nps_fdm_gazebo.cpp.
References NpsFdm::agl, NpsFdm::airspeed, LlaCoor_f::alt, NpsFdm::aoa, NpsFdm::body_accel, NpsFdm::body_ecef_accel, NpsFdm::body_ecef_rotvel, NpsFdm::body_ecef_vel, NpsFdm::body_inertial_accel, NpsFdm::body_inertial_rotvel, double_quat_of_eulers(), NpsFdm::dynamic_pressure, LtpDef_d::ecef, LtpDef_f::ecef, NpsFdm::ecef_ecef_accel, NpsFdm::ecef_ecef_vel, ecef_of_ned_point_d(), ecef_of_ned_vect_d(), NpsFdm::ecef_pos, NpsFdm::elevator, fdm, NpsFdm::flap, foo, gc_of_gd_lat_d(), LtpDef_f::hmsl, NpsFdm::hmsl, LlaCoor_d::lat, LlaCoor_f::lat, NpsFdm::left_aileron, LtpDef_f::lla, lla_of_ecef_d(), NpsFdm::lla_pos, NpsFdm::lla_pos_geoc, NpsFdm::lla_pos_geod, NpsFdm::lla_pos_pprz, LlaCoor_f::lon, NpsFdm::ltp_ecef_accel, NpsFdm::ltp_ecef_vel, NpsFdm::ltp_g, NpsFdm::ltp_h, LtpDef_f::ltp_of_ecef, NpsFdm::ltp_to_body_eulers, NpsFdm::ltp_to_body_quat, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, NpsFdm::ltpprz_to_body_eulers, NpsFdm::ltpprz_to_body_quat, FloatRMat::m, model, State::ned_origin_f, NpsFdm::num_engines, pprz_isa_pressure_of_height(), NpsFdm::pressure, NpsFdm::pressure_sl, NpsFdm::right_aileron, NpsFdm::rudder, NpsFdm::sideslip, sonar, state, NpsFdm::temperature, NpsFdm::time, to_global_pprz_eulers(), to_pprz_body(), to_pprz_ltp(), to_pprz_ned(), to_pprz_rates(), NpsFdm::wind, EcefCoor_d::x, EcefCoor_f::x, EcefCoor_f::y, NedCoor_d::z, and EcefCoor_f::z.
Referenced by nps_fdm_run_step().
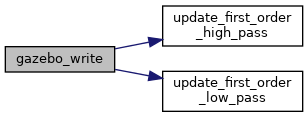
Here is the call graph for this function: Here is the caller graph for this function:Write actuator commands to Gazebo.
This function takes the normalized commands and applies them as forces and torques in Gazebo. Since the commands are normalized in [0,1], their thrusts (NPS_ACTUATOR_THRUSTS) and torques (NPS_ACTUATOR_TORQUES) need to be specified in the airframe file. Their values need to be specified in the same order as the NPS_ACTUATOR_NAMES and should be provided in SI units. See conf/airframes/examples/ardrone2_gazebo.xml for an example.
The forces and torques are applied to (the origin of) the links named in NPS_ACTUATOR_NAMES. See conf/simulator/gazebo/models/ardrone/ardrone.sdf for an example.
| act_commands | |
| commands_nb |
Definition at line 651 of file nps_fdm_gazebo.cpp.
References autopilot, foo, gazebo_actuators, gazebo_actuators_t::highpass, gazebo_actuators_t::lowpass, gazebo_actuators_t::max_ang_momentum, model, pprz_autopilot::motors_on, gazebo_actuators_t::names, gazebo_actuators_t::thrusts, gazebo_actuators_t::torques, update_first_order_high_pass(), and update_first_order_low_pass().
Referenced by nps_fdm_run_step().
Here is the call graph for this function: Here is the caller graph for this function:Set up a Gazebo server.
Starts a Gazebo server, adds conf/simulator/gazebo/models to its model path and loads the world specified by NPS_GAZEBO_WORLD.
This function also obtaines a pointer to the aircraft model, named NPS_GAZEBO_AC_NAME ('paparazzi_uav' by default). This pointer, 'model', is used to read the state and write actuator commands in gazebo_read and _write.
Definition at line 337 of file nps_fdm_gazebo.cpp.
References ct, foo, gazebo_actuators, h(), gazebo_actuators_t::max_ang_momentum, Min, model, MOTOR_MIXING_YAW_COEF, MT9F002_TARGET_FPS, MT9V117_TARGET_FPS, NPS_COMMANDS_NB, NPS_GAZEBO_AC_NAME, NPS_GAZEBO_WORLD, sonar, gazebo_actuators_t::torques, and yaw_coef.
Referenced by nps_fdm_run_step().
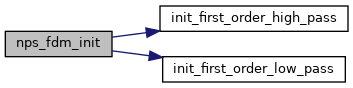
Here is the call graph for this function: Here is the caller graph for this function:Initialize actuator dynamics, set unused fields in fdm.
NPS FDM rover init.
| dt |
Definition at line 231 of file nps_fdm_gazebo.cpp.
References NpsFdm::curr_dt, fdm, foo, gazebo_actuators, gazebo_actuators_t::highpass, NpsFdm::init_dt, init_first_order_high_pass(), init_first_order_low_pass(), gazebo_actuators_t::lowpass, gazebo_actuators_t::max_ang_momentum, NpsFdm::nan_count, and NPS_COMMANDS_NB.
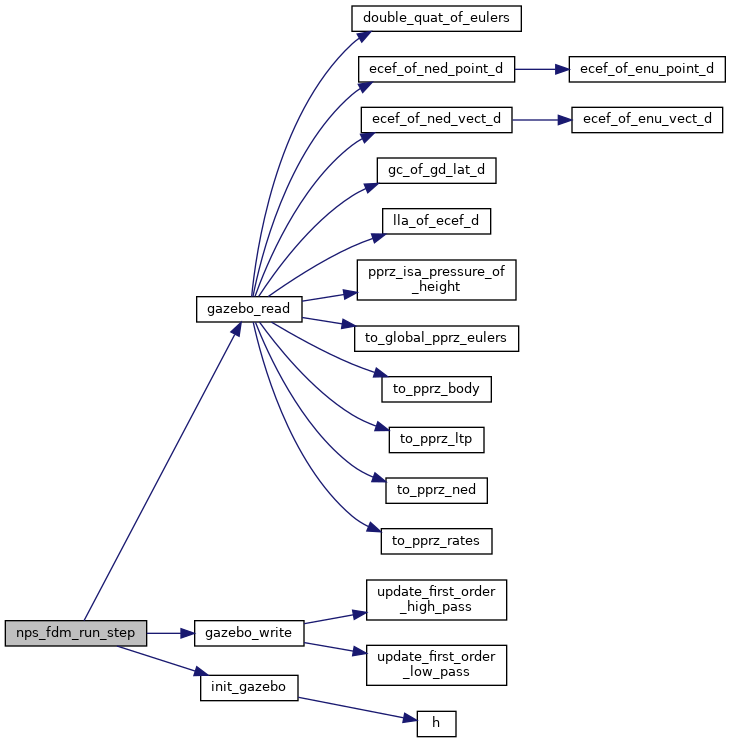
Here is the call graph for this function:Update the simulation state.
Minimum complexity flight dynamic model In legacy Paparazzi simulator, was implemented in OCaml and correspond to the 'sim' target.
| launch | |
| act_commands | |
| commands_nb |
Definition at line 260 of file nps_fdm_gazebo.cpp.
References foo, gazebo_initialized, gazebo_read(), gazebo_write(), init_gazebo(), and model.
Here is the call graph for this function:Set temperature in degrees Celcius at given height h above MSL.
Definition at line 319 of file nps_fdm_gazebo.cpp.
Definition at line 312 of file nps_fdm_gazebo.cpp.
Definition at line 299 of file nps_fdm_gazebo.cpp.
Definition at line 305 of file nps_fdm_gazebo.cpp.
|
inline |
Definition at line 207 of file nps_fdm_gazebo.cpp.
References foo, DoubleEulers::phi, DoubleEulers::psi, and DoubleEulers::theta.
Referenced by gazebo_read().
Here is the caller graph for this function:
|
inline |
Definition at line 180 of file nps_fdm_gazebo.cpp.
References foo, and DoubleVect3::x.
Referenced by gazebo_read().
Here is the caller graph for this function:
|
inline |
Definition at line 153 of file nps_fdm_gazebo.cpp.
References foo, and EcefCoor_d::x.
|
inline |
Definition at line 198 of file nps_fdm_gazebo.cpp.
References DoubleEulers::phi, DoubleEulers::psi, and DoubleEulers::theta.
|
inline |
Definition at line 171 of file nps_fdm_gazebo.cpp.
References foo, and LlaCoor_d::lat.
|
inline |
Definition at line 216 of file nps_fdm_gazebo.cpp.
References foo, and DoubleVect3::x.
Referenced by gazebo_read().
Here is the caller graph for this function:
|
inline |
Definition at line 162 of file nps_fdm_gazebo.cpp.
References foo, and NedCoor_d::x.
Referenced by gazebo_read().
Here is the caller graph for this function:
|
inline |
Definition at line 189 of file nps_fdm_gazebo.cpp.
References foo, and DoubleRates::p.
Referenced by gazebo_read().
Here is the caller graph for this function:
|
static |
Definition at line 145 of file nps_fdm_gazebo.cpp.
Referenced by init_gazebo().
| struct NpsFdm fdm |
Holds all necessary NPS FDM state information.
Definition at line 138 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_read(), and nps_fdm_init().
| struct gazebo_actuators_t gazebo_actuators = { NPS_ACTUATOR_NAMES, NPS_ACTUATOR_THRUSTS, NPS_ACTUATOR_TORQUES, { }, { }, { }} |
Definition at line 123 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_write(), init_gazebo(), and nps_fdm_init().
Definition at line 141 of file nps_fdm_gazebo.cpp.
Referenced by nps_fdm_run_step().
|
static |
Definition at line 142 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_read(), gazebo_write(), init_gazebo(), and nps_fdm_run_step().
Definition at line 135 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_read(), init_gazebo(), nps_sensor_sonar_init(), nps_sensor_sonar_run_step(), and save_shot_on_disk().