|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Measurement Specialties (Intersema) MS5611-01BA and MS5607-02BA03 pressure/temperature sensor interface for SPI. More...
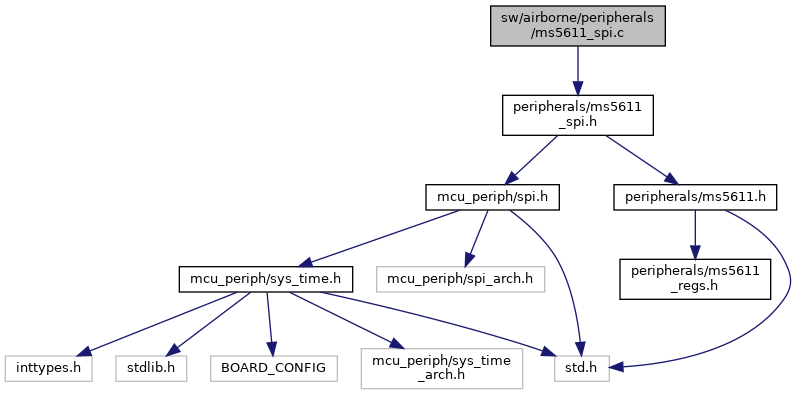
#include "peripherals/ms5611_spi.h" Include dependency graph for ms5611_spi.c:
Include dependency graph for ms5611_spi.c:Go to the source code of this file.
Functions | |
| void | ms5611_spi_init (struct Ms5611_Spi *ms, struct spi_periph *spi_p, uint8_t slave_idx, bool is_ms5607) |
| void | ms5611_spi_start_configure (struct Ms5611_Spi *ms) |
| void | ms5611_spi_start_conversion (struct Ms5611_Spi *ms) |
| void | ms5611_spi_periodic_check (struct Ms5611_Spi *ms) |
| Periodic function to ensure proper delay after triggering reset or conversion. | |
| void | ms5611_spi_event (struct Ms5611_Spi *ms) |
Measurement Specialties (Intersema) MS5611-01BA and MS5607-02BA03 pressure/temperature sensor interface for SPI.
Definition in file ms5611_spi.c.
| void ms5611_spi_event | ( | struct Ms5611_Spi * | ms | ) |
Definition at line 133 of file ms5611_spi.c.
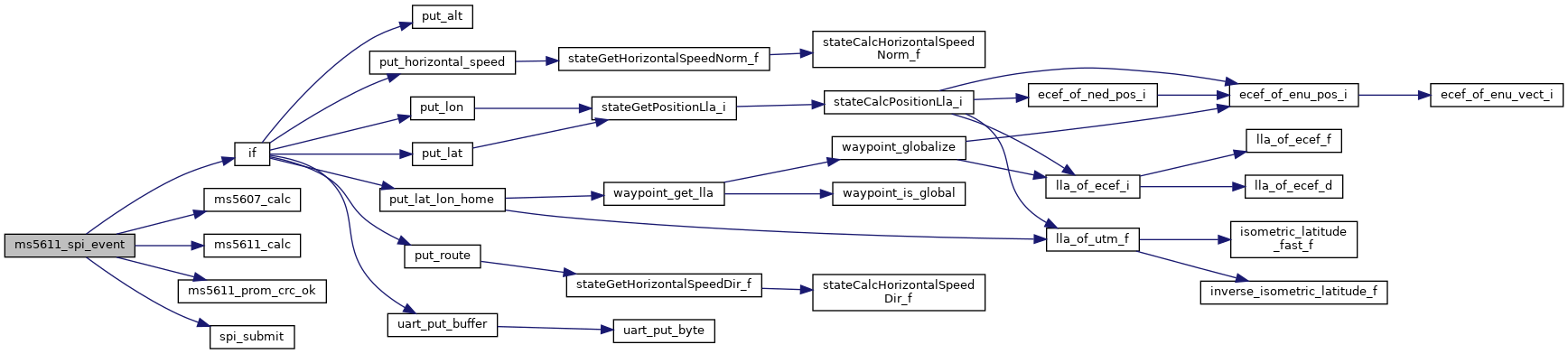
References foo, ms5607_calc(), ms5611_calc(), ms5611_prom_crc_ok(), MS5611_PROM_READ, MS5611_START_CONV_D2, MS5611_STATUS_ADC_D1, MS5611_STATUS_ADC_D2, MS5611_STATUS_CONV_D2, MS5611_STATUS_IDLE, MS5611_STATUS_PROM, MS5611_STATUS_UNINIT, PROM_NB, spi_submit(), SPITransDone, SPITransFailed, and SPITransSuccess.
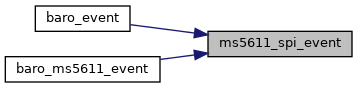
Referenced by baro_event(), and baro_ms5611_event().
Here is the call graph for this function: Here is the caller graph for this function:| void ms5611_spi_init | ( | struct Ms5611_Spi * | ms, |
| struct spi_periph * | spi_p, | ||
| uint8_t | slave_idx, | ||
| bool | is_ms5607 | ||
| ) |
Definition at line 33 of file ms5611_spi.c.
References foo, MS5611_STATUS_UNINIT, SPICphaEdge2, SPICpolIdleHigh, SPIDiv64, SPIDss8bit, SPIMSBFirst, SPISelectUnselect, SPITransDone, and spi_periph::status.
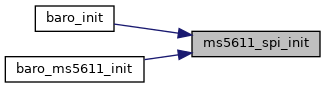
Referenced by baro_init(), and baro_ms5611_init().
Here is the caller graph for this function:| void ms5611_spi_periodic_check | ( | struct Ms5611_Spi * | ms | ) |
Periodic function to ensure proper delay after triggering reset or conversion.
Should run at 100Hz max. Typical conversion time is 8.22ms at max resolution.
Definition at line 92 of file ms5611_spi.c.
References foo, MS5611_ADC_READ, MS5611_PROM_READ, MS5611_STATUS_ADC_D1, MS5611_STATUS_ADC_D2, MS5611_STATUS_CONV_D1, MS5611_STATUS_CONV_D1_OK, MS5611_STATUS_CONV_D2, MS5611_STATUS_CONV_D2_OK, MS5611_STATUS_PROM, MS5611_STATUS_RESET, MS5611_STATUS_RESET_OK, spi_submit(), and SPITransDone.
Referenced by baro_ms5611_periodic_check(), and ms5611_spi_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| void ms5611_spi_start_configure | ( | struct Ms5611_Spi * | ms | ) |
Definition at line 65 of file ms5611_spi.c.
References foo, MS5611_SOFT_RESET, MS5611_STATUS_RESET, MS5611_STATUS_UNINIT, and spi_submit().
Referenced by ms5611_spi_read().
Here is the call graph for this function: Here is the caller graph for this function:| void ms5611_spi_start_conversion | ( | struct Ms5611_Spi * | ms | ) |
Definition at line 76 of file ms5611_spi.c.
References foo, MS5611_START_CONV_D1, MS5611_STATUS_CONV_D1, MS5611_STATUS_IDLE, spi_submit(), and SPITransDone.
Referenced by ms5611_spi_read().
Here is the call graph for this function: Here is the caller graph for this function: