|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
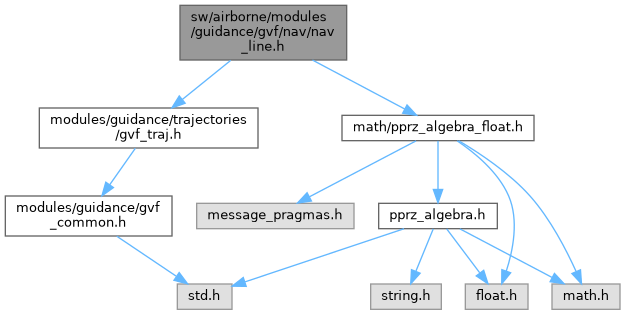
 Include dependency graph for nav_line.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_line.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_li_par |
| struct | gvf_seg_par |
Functions | |
| bool | nav_gvf_line_XY_heading (float x, float y, float heading) |
| bool | nav_gvf_line_wp_heading (uint8_t wp, float heading) |
| bool | nav_gvf_line_XY1_XY2 (float x1, float y1, float x2, float y2) |
| bool | nav_gvf_line_wp1_wp2 (uint8_t wp1, uint8_t wp2) |
| bool | nav_gvf_segment_loop_XY1_XY2 (float x1, float y1, float x2, float y2, float d1, float d2) |
| bool | nav_gvf_segment_loop_wp1_wp2 (uint8_t wp1, uint8_t wp2, float d1, float d2) |
| bool | nav_gvf_segment_XY1_XY2 (float x1, float y1, float x2, float y2) |
| bool | nav_gvf_segment_wp1_wp2 (uint8_t wp1, uint8_t wp2) |
| bool | nav_gvf_segment_points (struct FloatVect2 start, struct FloatVect2 end) |
Variables | |
| gvf_li_par | gvf_line_par |
| gvf_seg_par | gvf_segment_par |
| struct gvf_li_par |
Definition at line 41 of file nav_line.h.
| Data Fields | ||
|---|---|---|
| float | heading | |
| float | ke | |
| float | kn | |
| struct gvf_seg_par |
Definition at line 52 of file nav_line.h.
| Data Fields | ||
|---|---|---|
| float | d1 | |
| float | d2 | |
Definition at line 161 of file nav_line.c.
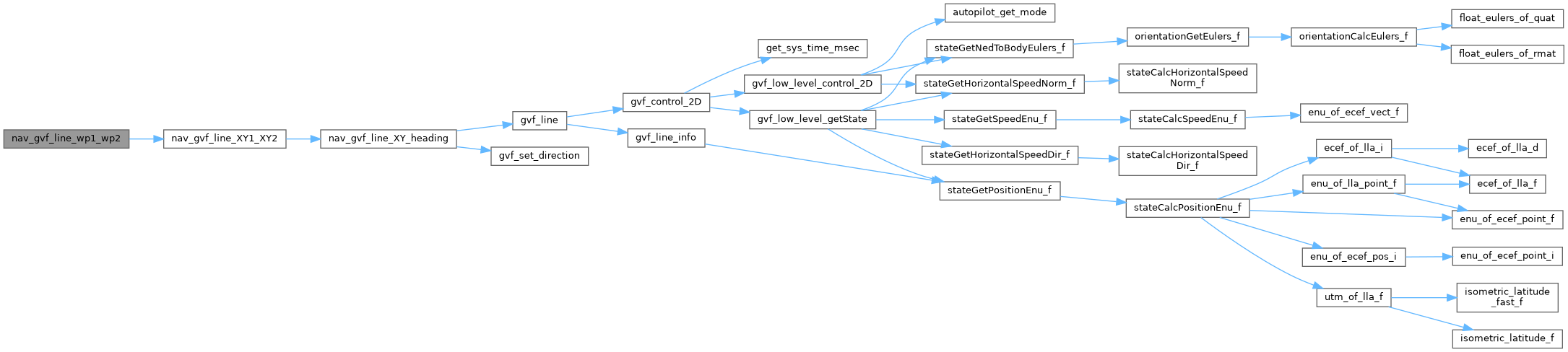
References foo, gvf_p_len_wps, gvf_trajectory, nav_gvf_line_XY1_XY2(), gvf_tra::p, WaypointX, and WaypointY.
Here is the call graph for this function:Definition at line 127 of file nav_line.c.
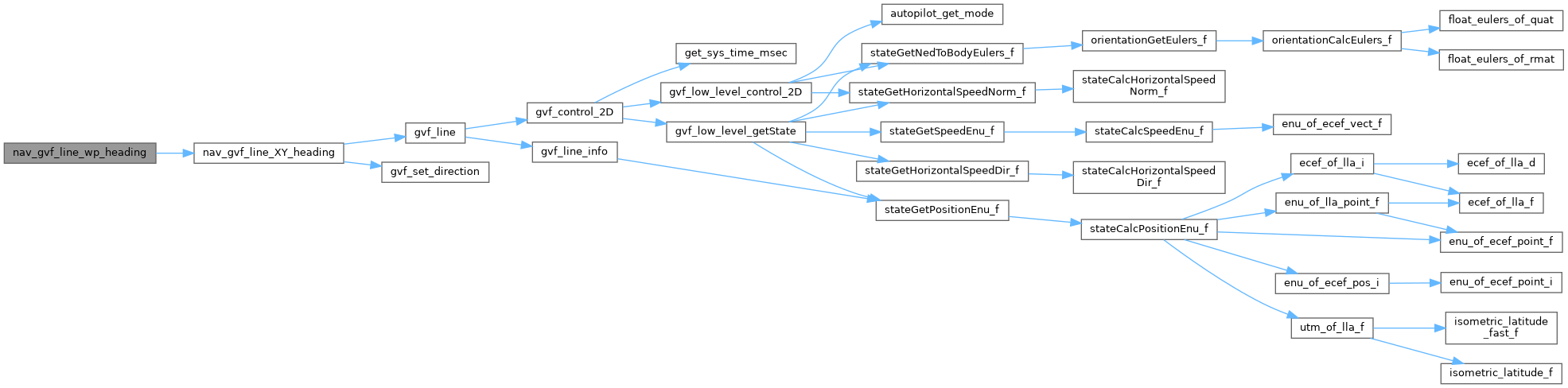
References b, foo, heading, nav_gvf_line_XY_heading(), WaypointX, and WaypointY.
Here is the call graph for this function:Definition at line 137 of file nav_line.c.
References foo, gvf_p_len_wps, gvf_segment, gvf_trajectory, nav_gvf_line_XY_heading(), gvf_tra::p, gvf_seg::seg, gvf_seg::x1, gvf_seg::x2, gvf_seg::y1, and gvf_seg::y2.
Referenced by nav_gvf_line_wp1_wp2(), and nav_gvf_segment_XY1_XY2().
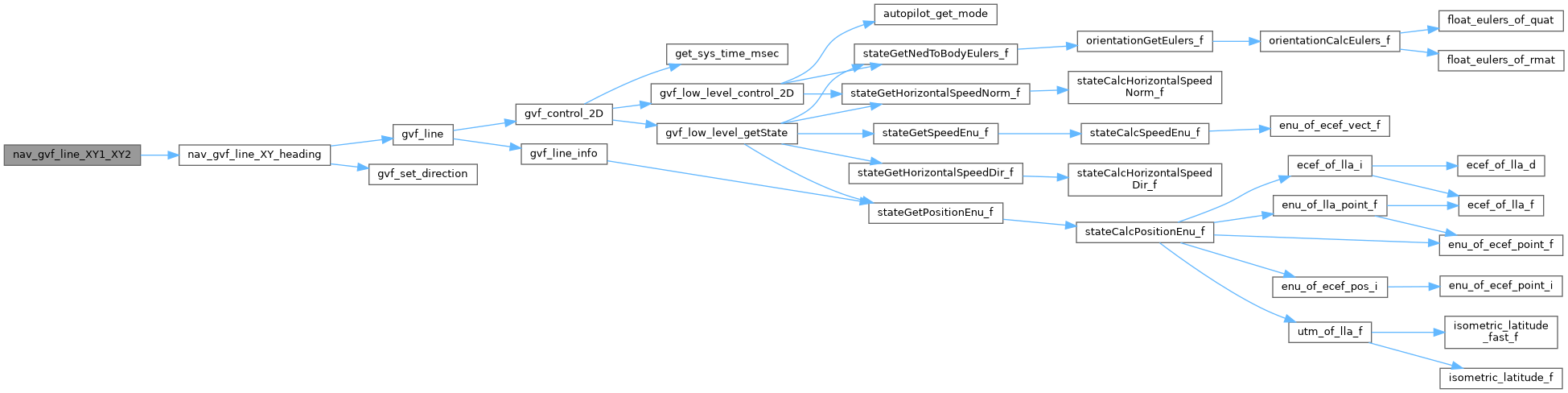
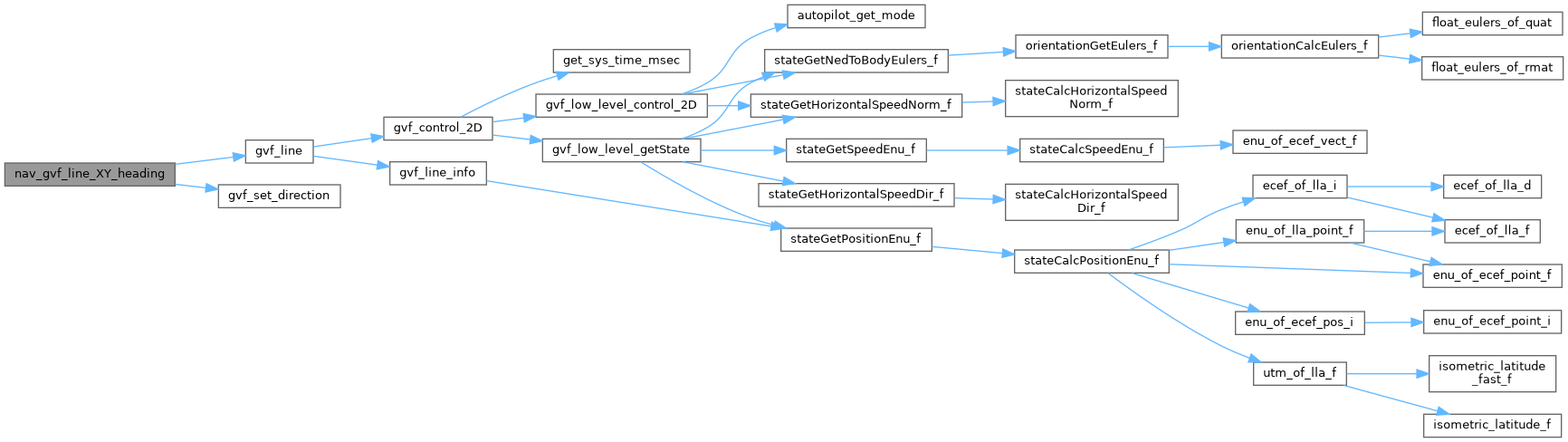
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 120 of file nav_line.c.
References b, gvf_line(), gvf_set_direction(), and heading.
Referenced by nav_gvf_line_wp_heading(), and nav_gvf_line_XY1_XY2().
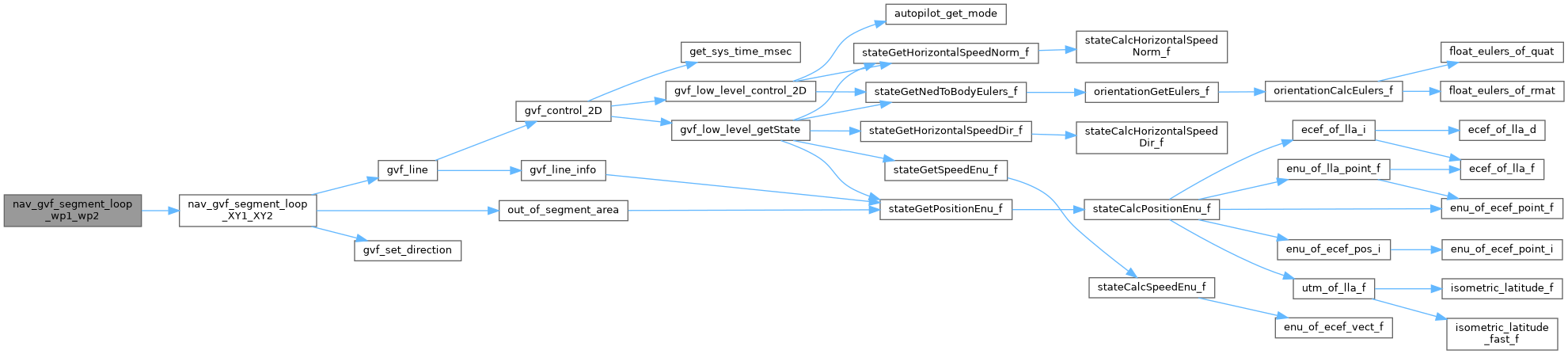
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 201 of file nav_line.c.
References d1, d2, foo, gvf_p_len_wps, gvf_trajectory, nav_gvf_segment_loop_XY1_XY2(), gvf_tra::p, WaypointX, and WaypointY.
Here is the call graph for this function:
|
extern |
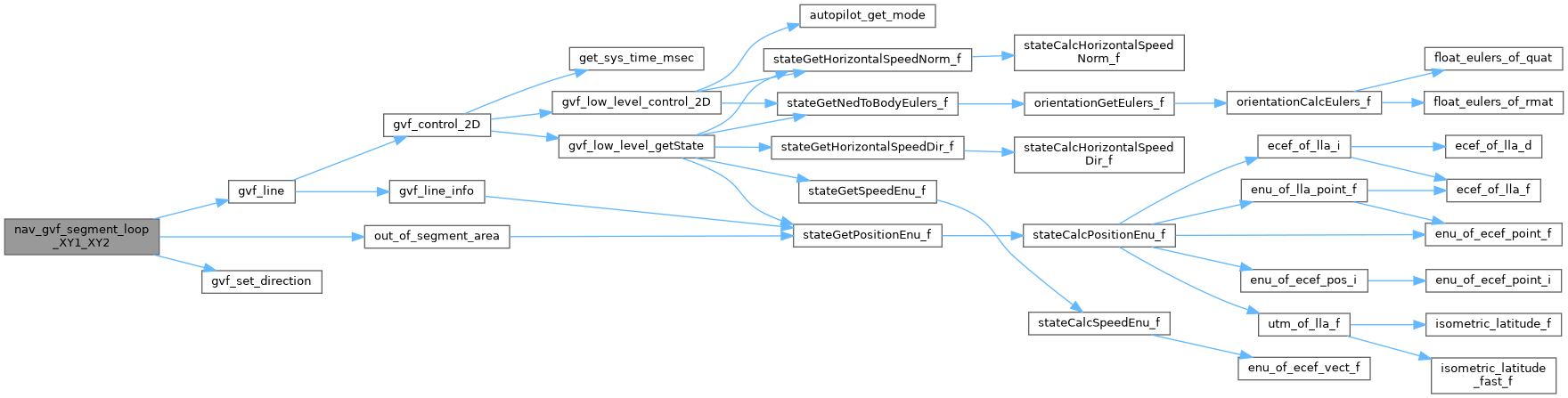
Definition at line 177 of file nav_line.c.
References alpha, d1, d2, foo, gvf_line(), gvf_segment, gvf_set_direction(), out_of_segment_area(), s, gvf_seg::seg, gvf_seg::x1, gvf_seg::x2, gvf_seg::y1, and gvf_seg::y2.
Referenced by nav_gvf_segment_loop_wp1_wp2().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 253 of file nav_line.c.
References nav_gvf_segment_XY1_XY2(), FloatVect2::x, and FloatVect2::y.
Referenced by nav_gvf_survey_polygon_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 239 of file nav_line.c.
References foo, gvf_p_len_wps, gvf_trajectory, nav_gvf_segment_XY1_XY2(), gvf_tra::p, WaypointX, and WaypointY.
Here is the call graph for this function:Definition at line 217 of file nav_line.c.
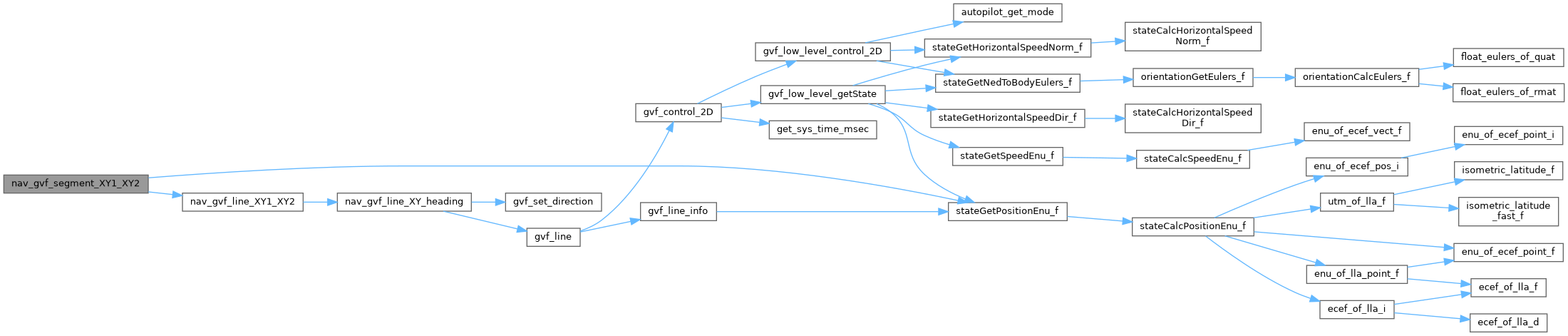
References foo, nav_gvf_line_XY1_XY2(), p, and stateGetPositionEnu_f().
Referenced by nav_gvf_segment_points(), and nav_gvf_segment_wp1_wp2().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
|
extern |
Definition at line 54 of file nav_line.c.