|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
UBX protocol specific code. More...
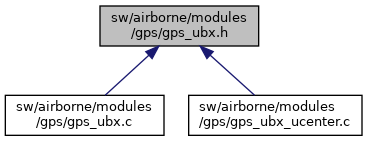
 Include dependency graph for gps_ubx.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gps_ubx.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | GpsUbx |
Macros | |
| #define | GPS_UBX_NB 1 |
| #define | PRIMARY_GPS GPS_UBX |
| #define | GPS_UBX_NB_CHANNELS 40 |
| #define | GPS_UBX_MAX_PAYLOAD 512 |
Functions | |
| void | gps_ubx_init (void) |
| void | gps_ubx_event (void) |
| void | gps_ubx_parse_HITL_UBX (uint8_t *buf) |
| void | ubx_header (struct link_device *dev, uint8_t nav_id, uint8_t msg_id, uint16_t len) |
| void | ubx_trailer (struct link_device *dev) |
| void | ubx_send_bytes (struct link_device *dev, uint8_t len, uint8_t *bytes) |
| void | ubx_send_cfg_rst (struct link_device *dev, uint16_t bbr, uint8_t reset_mode) |
| void | gps_ubx_periodic_check (void) |
Variables | |
| struct GpsUbx | gps_ubx [GPS_UBX_NB] |
| uint8_t | gps_ubx_reset |
UBX protocol specific code.
Definition in file gps_ubx.h.
| struct GpsUbx |
Collaboration diagram for GpsUbx:| Data Fields | ||
|---|---|---|
| uint8_t | ck_a | |
| uint8_t | ck_b | |
| struct link_device * | dev | |
| uint8_t | error_cnt | |
| uint8_t | error_last | |
| uint16_t | len | |
| bool | msg_available | |
| uint8_t | msg_buf[GPS_UBX_MAX_PAYLOAD] | |
| uint8_t | msg_class | |
| uint8_t | msg_id | |
| uint16_t | msg_idx | |
| bool | pacc_valid | |
| uint8_t | send_ck_a | |
| uint8_t | send_ck_b | |
| uint8_t | sol_flags | |
| struct GpsState | state | |
| uint8_t | status | |
| uint8_t | status_flags | |
Definition at line 139 of file gps_ubx.c.
References CFG_RST_BBR_Coldstart, CFG_RST_BBR_Hotstart, CFG_RST_BBR_Warmstart, CFG_RST_Reset_Controlled, DEBUG_PRINT, dev, GpsUbx::dev, foo, gps_ubx, gps_ubx_msg(), GPS_UBX_NB, gps_ubx_parse(), gps_ubx_reset, and ubx_send_cfg_rst().
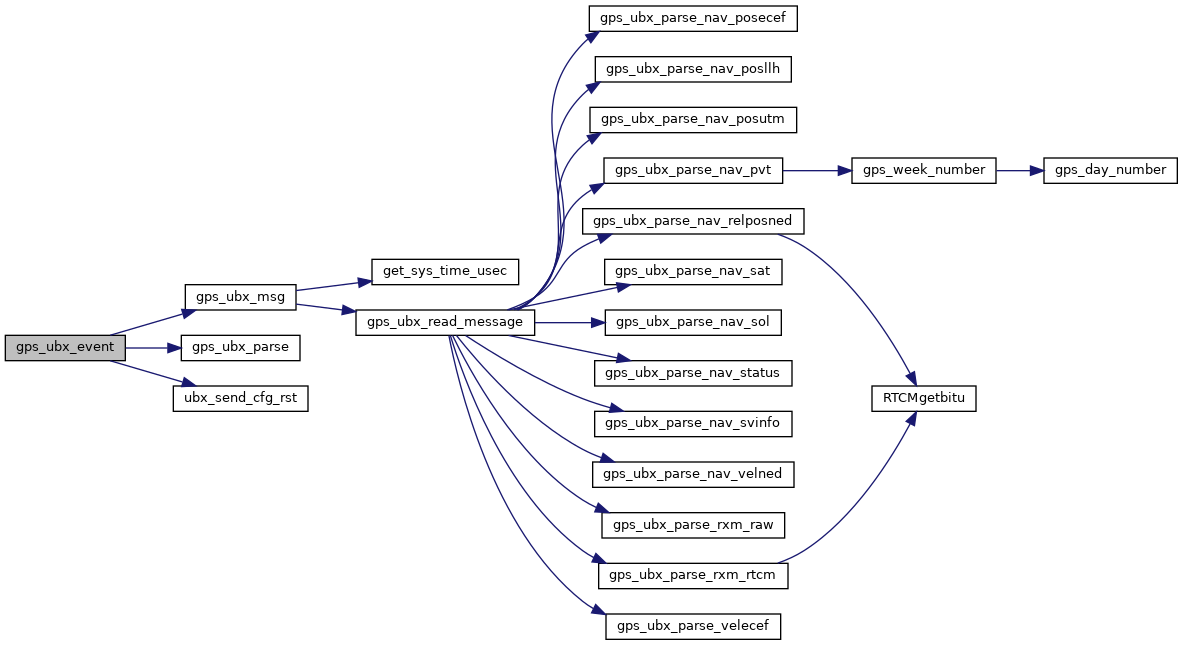
Here is the call graph for this function:Definition at line 117 of file gps_ubx.c.
References GpsState::comp_id, GpsUbx::dev, GpsUbx::error_cnt, GpsUbx::error_last, foo, gps_ubx, GPS_UBX2_ID, GPS_UBX_BOOTRESET, GPS_UBX_ERR_NONE, GPS_UBX_ID, GPS_UBX_NB, gps_ubx_reset, GpsUbx::msg_available, GpsUbx::pacc_valid, GpsUbx::state, GpsUbx::status, and UNINIT.
This code simulates gps_ubx.c:parse_ubx()
Definition at line 166 of file gps_ubx.c.
References GpsUbx::error_cnt, GpsUbx::error_last, foo, gps_ubx, GPS_UBX_ERR_OVERRUN, GpsUbx::msg_available, GpsUbx::msg_class, and GpsUbx::msg_id.
Definition at line 697 of file gps_ubx.c.
References gps_periodic_check(), gps_ubx, GPS_UBX_NB, and state.
Here is the call graph for this function:
|
extern |
Definition at line 617 of file gps_ubx.c.
References dev, foo, gps_ubx, GPS_UBX_NB, GpsUbx::send_ck_a, GpsUbx::send_ck_b, and ubx_send_1byte().
Here is the call graph for this function:
|
extern |
Definition at line 646 of file gps_ubx.c.
References dev, and ubx_send_1byte().
Here is the call graph for this function:
|
extern |
|
extern |
Definition at line 634 of file gps_ubx.c.
References dev, gps_ubx, GPS_UBX_NB, GpsUbx::send_ck_a, and GpsUbx::send_ck_b.
|
extern |
Definition at line 78 of file gps_ubx.c.
Referenced by ArduIMU_periodicGPS(), gps_ubx_event(), gps_ubx_init(), gps_ubx_parse_HITL_UBX(), gps_ubx_periodic_check(), gps_ubx_ucenter_event(), ubx_header(), ubx_send_1byte(), and ubx_trailer().
|
extern |
Definition at line 79 of file gps_ubx.c.
Referenced by gps_ubx_event(), and gps_ubx_init().