|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
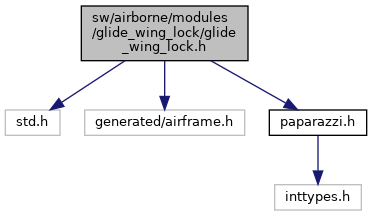
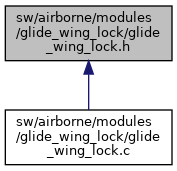
 Include dependency graph for glide_wing_lock.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for glide_wing_lock.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | ROTORCRAFT_COMMANDS_THROUGH_MODULE |
Functions | |
| void | init (void) |
| void | glide_wing_lock_init (void) |
| void | glide_wing_lock_event (void) |
| void | glide_wing_lock_periodic (void) |
Definition in file glide_wing_lock.h.
| #define ROTORCRAFT_COMMANDS_THROUGH_MODULE |
Definition at line 33 of file glide_wing_lock.h.
Definition at line 63 of file glide_wing_lock.c.
References adcbuf, adc_buf::av_nb_sample, foo, lock_wings, MIN_PPRZ, radio_control, adc_buf::sum, RadioControl::values, WING_POS_DOWN_THRESH, WING_POS_LOCK_MAX_THRESH, WING_POS_LOCK_MIN_THRESH, and WING_POS_LOCK_SWITCH.
Definition at line 58 of file glide_wing_lock.c.
References adc_buf_channel(), adcbuf, and foo.
Here is the call graph for this function:Definition at line 101 of file glide_wing_lock.c.
References adcbuf, adc_buf::av_nb_sample, DefaultChannel, DefaultDevice, foo, and adc_buf::sum.
Definition at line 57 of file nav_gls.c.
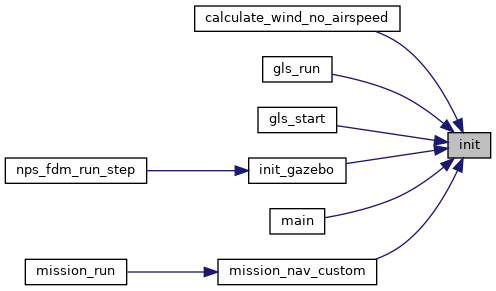
Referenced by calculate_wind_no_airspeed(), gls_run(), gls_start(), main(), mission_nav_custom(), mission_nav_custom(), mission_nav_custom(), p4_halley(), and step_adaptation().
Here is the caller graph for this function: