|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Mission Computer module, interfacing the mission computer (also known as Copilot), based losely on ISaAC: The Intelligent Safety and Airworthiness Co-Pilot module Based on paper "A Payload Verification and Management Framework for Small UAV-based Personal Remote Sensing Systems" by Cal Coopmans and Chris Coffin. More...
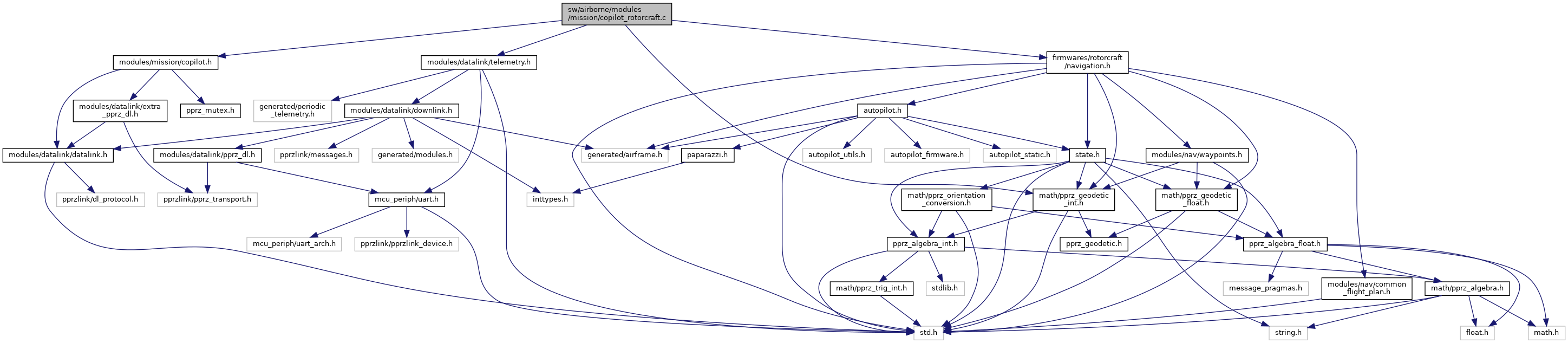
#include "modules/mission/copilot.h"#include "modules/datalink/telemetry.h"#include "firmwares/rotorcraft/navigation.h"#include "math/pprz_geodetic_int.h" Include dependency graph for copilot_rotorcraft.c:
Include dependency graph for copilot_rotorcraft.c:Go to the source code of this file.
Functions | |
| void | copilot_parse_move_wp_dl (uint8_t *buf) |
| If MOVE_WP from GCS. | |
Mission Computer module, interfacing the mission computer (also known as Copilot), based losely on ISaAC: The Intelligent Safety and Airworthiness Co-Pilot module Based on paper "A Payload Verification and Management Framework for Small UAV-based Personal Remote Sensing Systems" by Cal Coopmans and Chris Coffin.
Link: http://ieeexplore.ieee.org/abstract/document/6309316/
More info can be found on http://wiki.paparazziuav.org/wiki/Mission_computer
Copilot is intended mainly for mapping applications.
This module processes messages from Copilot, and either forwards them to the GCS (such as CAMERA_SNAPSHOT or CAMERA_PAYLOAD messages), or responds to them as necessary (such as MOVE_WP).
The module assumes the source of the messages is trusted (i.e. not authentication besides AC_ID check is performed).
Definition in file copilot_rotorcraft.c.
If MOVE_WP from GCS.
If MOVE_WP from extra_dl
In both cases, the MOVE_WP message was already processed in firmware_parse here we are taking care only about propagating the change
Definition at line 68 of file copilot_rotorcraft.c.
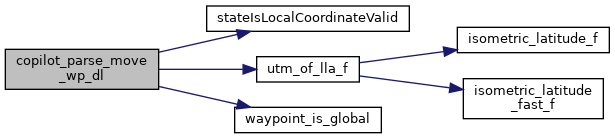
References LlaCoor_f::alt, LlaCoor_i::alt, DefaultChannel, DefaultDevice, dl_buffer, extra_dl_buffer, extra_pprz_tp, foo, LlaCoor_f::lat, LlaCoor_i::lat, LlaCoor_f::lon, LlaCoor_i::lon, nav_utm_east0, nav_utm_north0, nav_utm_zone0, nb_waypoint, stateGetHmslOrigin_i(), stateGetLlaOrigin_i(), stateIsLocalCoordinateValid(), utm_of_lla_f(), waypoint_is_global(), waypoints, point::x, point::y, and UtmCoor_f::zone.
Here is the call graph for this function: