|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
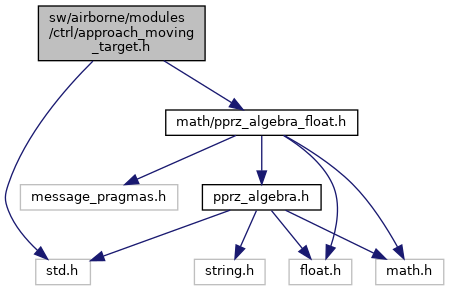
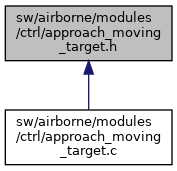
 Include dependency graph for approach_moving_target.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for approach_moving_target.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Amt |
Functions | |
| void | approach_moving_target_init (void) |
| void | follow_diagonal_approach (void) |
| Generates a velocity reference from a diagonal approach path. | |
| void | approach_moving_target_enable (uint8_t wp_id) |
| void | approach_moving_target_set_low_pass_freq (float filter_freq) |
Variables | |
| struct Amt | amt |
Definition in file approach_moving_target.h.
| struct Amt |
Definition at line 33 of file approach_moving_target.h.
Collaboration diagram for Amt:| Data Fields | ||
|---|---|---|
| float | cutoff_freq_filters_hz | |
| float | distance | |
| int32_t | enabled_time | |
| float | err_slowdown_gain | |
| float | pos_gain | |
| float | psi_ref | |
| struct FloatVect3 | rel_unit_vec | |
| float | relvel_gain | |
| float | slope_ref | |
| float | speed | |
| float | speed_gain | |
| uint8_t | wp_id | |
Definition at line 161 of file approach_moving_target.c.
References amt, Amt::enabled_time, get_sys_time_msec(), and Amt::wp_id.
Here is the call graph for this function:Definition at line 119 of file approach_moving_target.c.
References amt, approach_moving_target_set_low_pass_freq(), Amt::cutoff_freq_filters_hz, DefaultPeriodic, foo, register_periodic_telemetry(), and send_approach_moving_target().
Here is the call graph for this function:Definition at line 127 of file approach_moving_target.c.
References amt, Amt::cutoff_freq_filters_hz, foo, init_butterworth_2_low_pass(), target_heading_filt, target_pos_filt, and target_vel_filt.
Referenced by approach_moving_target_init().
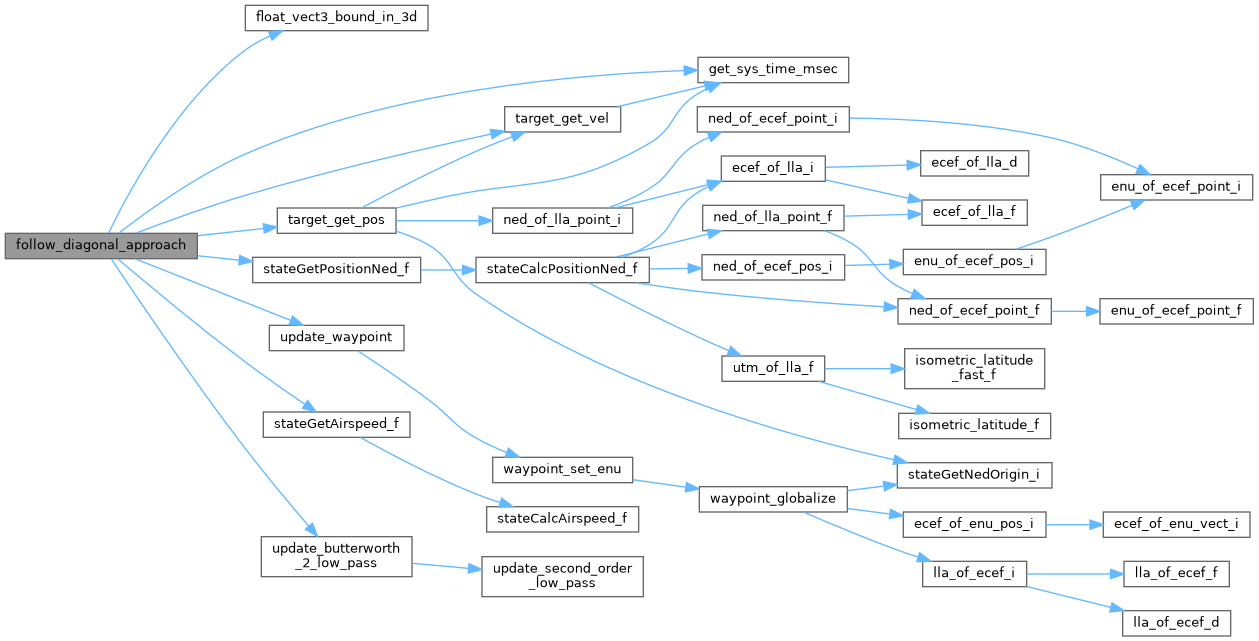
Here is the call graph for this function: Here is the caller graph for this function:Generates a velocity reference from a diagonal approach path.
Definition at line 171 of file approach_moving_target.c.
References amt, amt_telem, RotorcraftNavigation::climb_vspeed, AmtTelem::des_pos, AmtTelem::des_vel, RotorcraftNavigation::descend_vspeed, Amt::distance, Amt::enabled_time, Amt::err_slowdown_gain, FLOAT_ANGLE_NORMALIZE, float_vect3_bound_in_3d(), foo, get_sys_time_msec(), nav, NAVIGATION_FREQUENCY, SecondOrderLowPass::o, Amt::pos_gain, Amt::psi_ref, Amt::rel_unit_vec, Amt::relvel_gain, Amt::slope_ref, Amt::speed, Amt::speed_gain, stateGetAirspeed_f(), stateGetPositionNed_f(), target_get_pos(), target_get_vel(), target_heading_filt, target_pos_filt, target_vel_filt, update_butterworth_2_low_pass(), update_waypoint(), VECT3_COPY, VECT3_DIFF, VECT3_NORM2, VECT3_SMUL, VECT3_SUM, VEL_SP_FCR_ID, Amt::wp_id, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:
|
extern |
Definition at line 79 of file approach_moving_target.c.
Referenced by amt22_get_position(), amt22_get_turns(), amt22_init(), amt22_periodic(), amt22_read(), amt22_thd(), approach_moving_target_enable(), approach_moving_target_init(), approach_moving_target_set_low_pass_freq(), follow_diagonal_approach(), and send_approach_moving_target().