|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Speed representations:
Collaboration diagram for Speed representations:Macros | |
| #define | SPEED_ECEF_I 0 |
| #define | SPEED_NED_I 1 |
| #define | SPEED_ENU_I 2 |
| #define | SPEED_HNORM_I 3 |
| #define | SPEED_HDIR_I 4 |
| #define | SPEED_ECEF_F 5 |
| #define | SPEED_NED_F 6 |
| #define | SPEED_ENU_F 7 |
| #define | SPEED_HNORM_F 8 |
| #define | SPEED_HDIR_F 9 |
| #define | SPEED_LOCAL_COORD ((1<<SPEED_NED_I)|(1<<SPEED_ENU_I)|(1<<SPEED_NED_F)|(1<<SPEED_ENU_F)) |
Functions | |
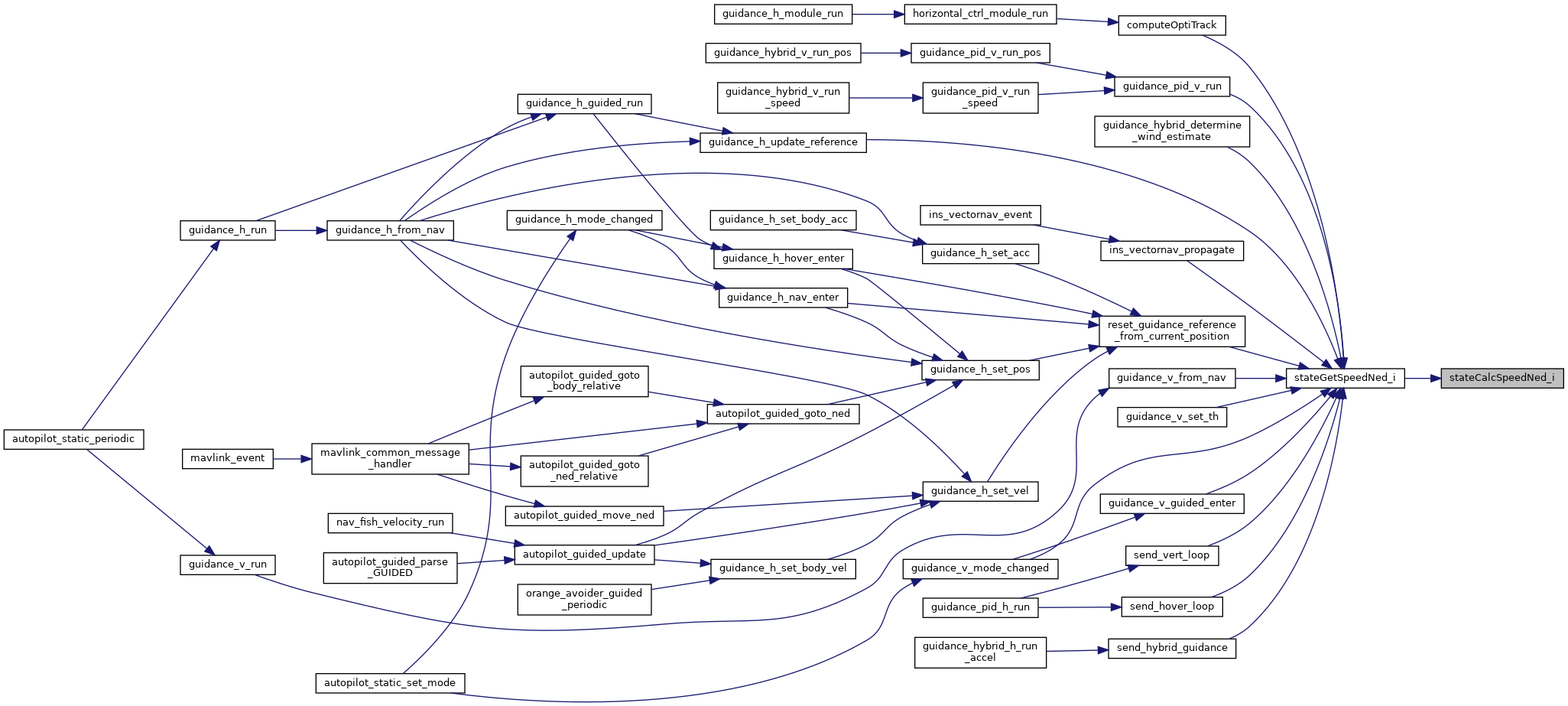
| void | stateCalcSpeedNed_i (void) |
| void | stateCalcSpeedEnu_i (void) |
| void | stateCalcSpeedEcef_i (void) |
| void | stateCalcHorizontalSpeedNorm_i (void) |
| void | stateCalcHorizontalSpeedDir_i (void) |
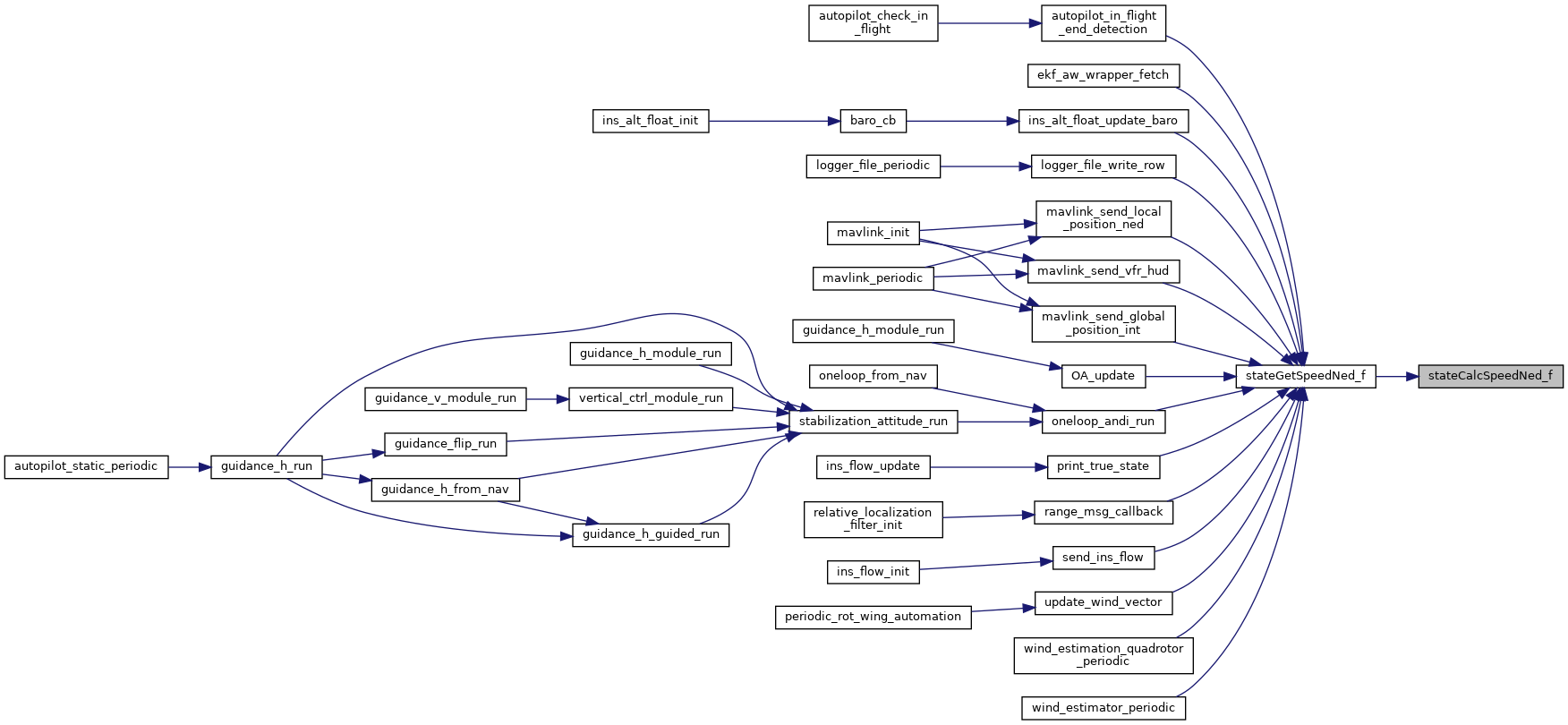
| void | stateCalcSpeedNed_f (void) |
| void | stateCalcSpeedEnu_f (void) |
| void | stateCalcSpeedEcef_f (void) |
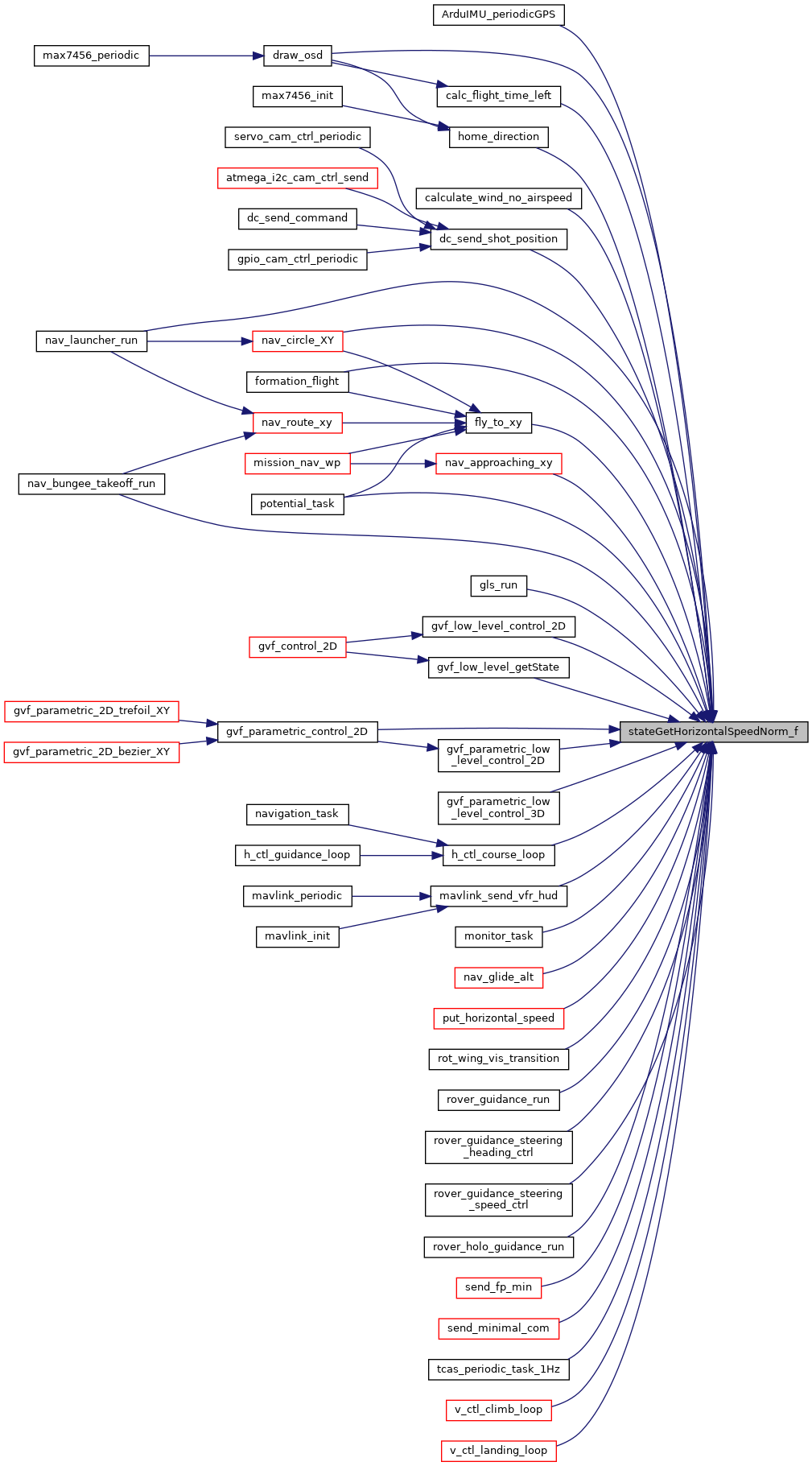
| void | stateCalcHorizontalSpeedNorm_f (void) |
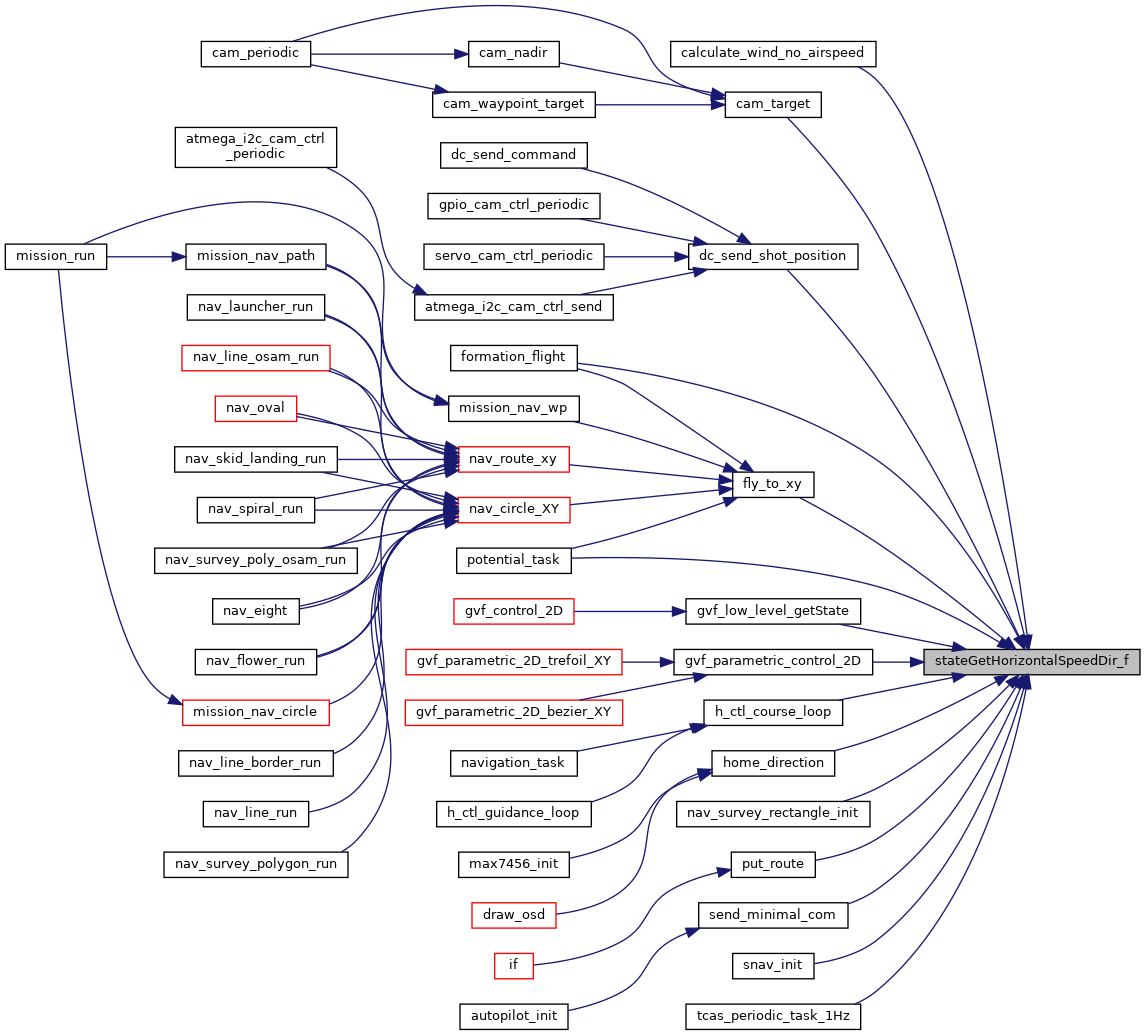
| void | stateCalcHorizontalSpeedDir_f (void) |
| static void | stateSetSpeedNed_i (uint16_t id, struct NedCoor_i *ned_speed) |
| Set ground speed in local NED coordinates (int). | |
| static void | stateSetSpeedEnu_i (uint16_t id, struct EnuCoor_i *enu_speed) |
| Set ground speed in local ENU coordinates (int). | |
| static void | stateSetSpeedEcef_i (uint16_t id, struct EcefCoor_i *ecef_speed) |
| Set ground speed in ECEF coordinates (int). | |
| static void | stateSetSpeed_i (uint16_t id, struct EcefCoor_i *ecef_speed, struct NedCoor_i *ned_speed, struct EnuCoor_i *enu_speed) |
| Set multiple speed coordinates (int). | |
| static void | stateSetSpeedNed_f (uint16_t id, struct NedCoor_f *ned_speed) |
| Set ground speed in local NED coordinates (float). | |
| static void | stateSetSpeedEnu_f (uint16_t id, struct EnuCoor_f *enu_speed) |
| Set ground speed in local ENU coordinates (float). | |
| static void | stateSetSpeedEcef_f (uint16_t id, struct EcefCoor_f *ecef_speed) |
| Set ground speed in ECEF coordinates (float). | |
| static void | stateSetSpeed_f (uint16_t id, struct EcefCoor_f *ecef_speed, struct NedCoor_f *ned_speed, struct EnuCoor_f *enu_speed) |
| Set multiple speed coordinates (float). | |
| static struct NedCoor_i * | stateGetSpeedNed_i (void) |
| Get ground speed in local NED coordinates (int). | |
| static struct EnuCoor_i * | stateGetSpeedEnu_i (void) |
| Get ground speed in local ENU coordinates (int). | |
| static struct EcefCoor_i * | stateGetSpeedEcef_i (void) |
| Get ground speed in ECEF coordinates (int). | |
| static uint32_t | stateGetHorizontalSpeedNorm_i (void) |
| Get norm of horizontal ground speed (int). | |
| static int32_t | stateGetHorizontalSpeedDir_i (void) |
| Get dir of horizontal ground speed (int). | |
| static struct NedCoor_f * | stateGetSpeedNed_f (void) |
| Get ground speed in local NED coordinates (float). | |
| static struct EnuCoor_f * | stateGetSpeedEnu_f (void) |
| Get ground speed in local ENU coordinates (float). | |
| static struct EcefCoor_f * | stateGetSpeedEcef_f (void) |
| Get ground speed in ECEF coordinates (float). | |
| static float | stateGetHorizontalSpeedNorm_f (void) |
| Get norm of horizontal ground speed (float). | |
| static float | stateGetHorizontalSpeedDir_f (void) |
| Get dir of horizontal ground speed (float). | |
| static struct Int32Vect3 * | stateGetAccelBody_i (void) |
| Get acceleration in Body coordinates (int). | |
Variables | |
| uint16_t | State::speed_status |
| Holds the status bits for all ground speed representations. | |
| uint16_t | State::speed_input_filter |
| Holds the input filter id for speed. | |
| struct EcefCoor_i | State::ecef_speed_i |
| Velocity in EarthCenteredEarthFixed coordinates. | |
| struct NedCoor_i | State::ned_speed_i |
| Velocity in North East Down coordinates. | |
| struct EnuCoor_i | State::enu_speed_i |
| Velocity in East North Up coordinates. | |
| uint32_t | State::h_speed_norm_i |
| Norm of horizontal ground speed. | |
| int32_t | State::h_speed_dir_i |
| Direction of horizontal ground speed. | |
| struct EcefCoor_f | State::ecef_speed_f |
| Velocity in EarthCenteredEarthFixed coordinates. | |
| struct NedCoor_f | State::ned_speed_f |
| speed in North East Down coordinates | |
| struct EnuCoor_f | State::enu_speed_f |
| Velocity in East North Up coordinates. | |
| float | State::h_speed_norm_f |
| Norm of horizontal ground speed. | |
| float | State::h_speed_dir_f |
| Direction of horizontal ground speed. | |
| #define SPEED_LOCAL_COORD ((1<<SPEED_NED_I)|(1<<SPEED_ENU_I)|(1<<SPEED_NED_F)|(1<<SPEED_ENU_F)) |
Definition at line 1179 of file state.c.
References State::enu_speed_f, State::enu_speed_i, foo, State::h_speed_dir_f, State::h_speed_dir_i, State::ned_speed_f, State::ned_speed_i, SPEED_ENU_F, SPEED_ENU_I, SPEED_FLOAT_OF_BFP, SPEED_HDIR_F, SPEED_HDIR_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_FLOAT_OF_BFP, state, NedCoor_f::x, EnuCoor_f::x, NedCoor_f::y, and EnuCoor_f::y.
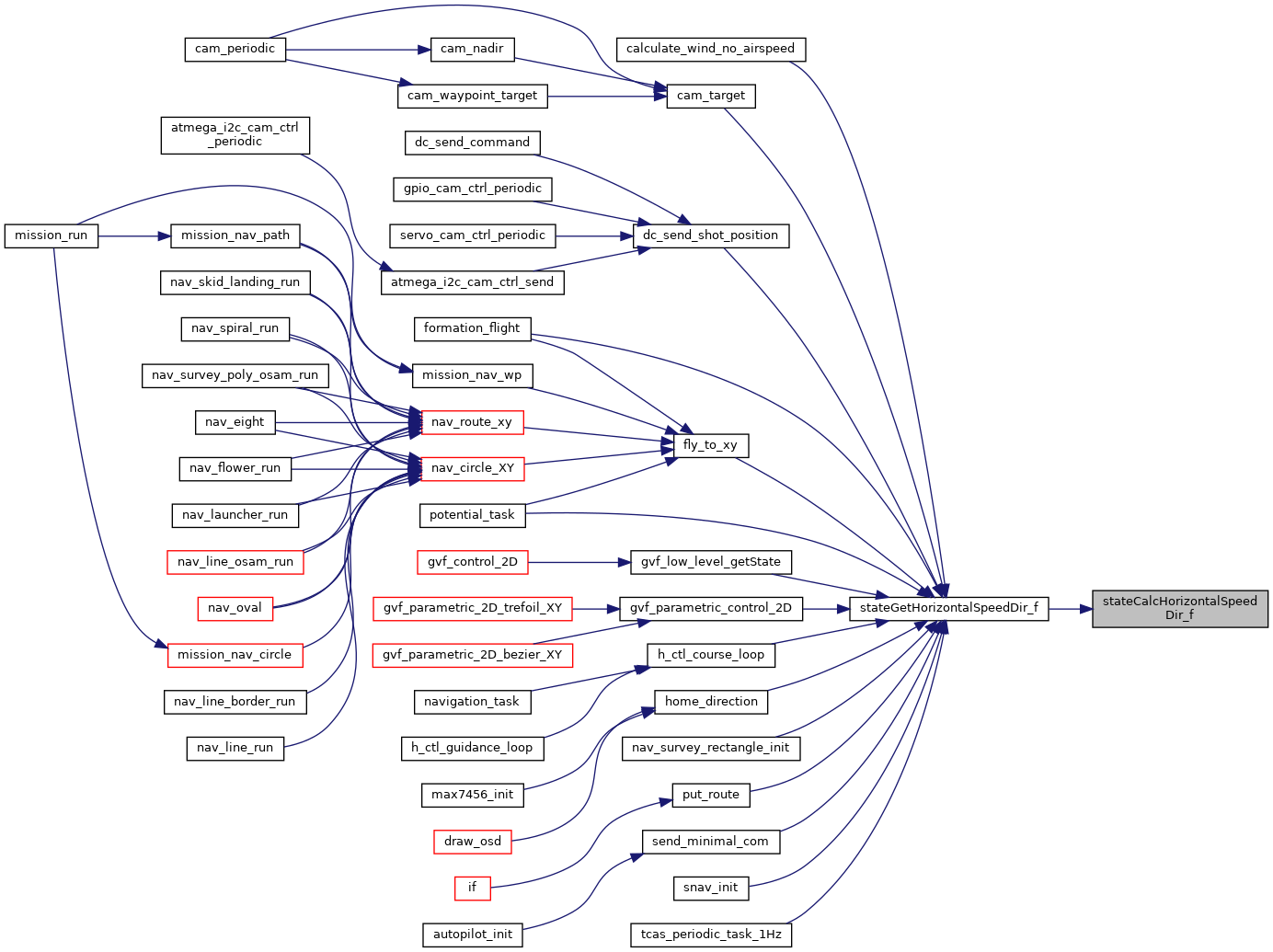
Referenced by stateGetHorizontalSpeedDir_f().
Here is the caller graph for this function:Definition at line 996 of file state.c.
References State::enu_speed_f, State::enu_speed_i, foo, State::h_speed_dir_f, State::h_speed_dir_i, int32_atan2(), INT32_COURSE_NORMALIZE, State::ned_speed_f, State::ned_speed_i, SPEED_BFP_OF_REAL, SPEED_ENU_F, SPEED_ENU_I, SPEED_HDIR_F, SPEED_HDIR_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_BFP_OF_REAL, state, NedCoor_i::x, EnuCoor_i::x, NedCoor_i::y, and EnuCoor_i::y.
Referenced by stateGetHorizontalSpeedDir_i().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1152 of file state.c.
References State::enu_speed_f, State::enu_speed_i, FLOAT_VECT2_NORM, foo, State::h_speed_norm_f, State::h_speed_norm_i, State::ned_speed_f, State::ned_speed_i, SPEED_ENU_F, SPEED_ENU_I, SPEED_FLOAT_OF_BFP, SPEED_HNORM_F, SPEED_HNORM_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_FLOAT_OF_BFP, and state.
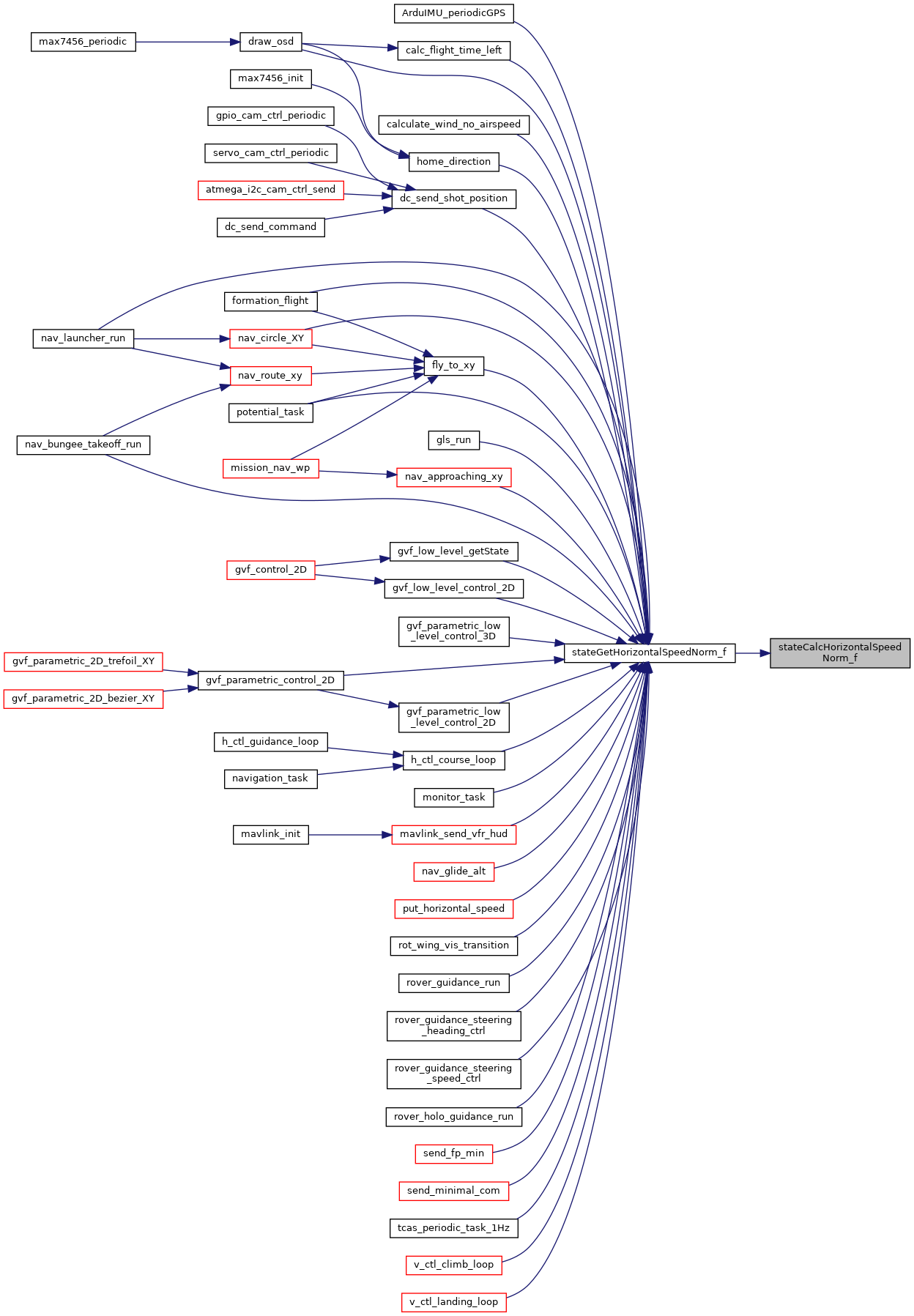
Referenced by stateGetHorizontalSpeedNorm_f().
Here is the caller graph for this function:Definition at line 950 of file state.c.
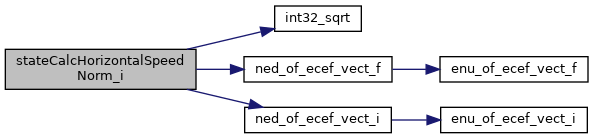
References State::ecef_speed_f, State::ecef_speed_i, State::enu_speed_f, State::enu_speed_i, FLOAT_VECT2_NORM, foo, State::h_speed_norm_f, State::h_speed_norm_i, INT32_SPEED_FRAC, int32_sqrt(), ned_of_ecef_vect_f(), ned_of_ecef_vect_i(), State::ned_origin_f, State::ned_origin_i, State::ned_speed_f, State::ned_speed_i, SPEED_BFP_OF_REAL, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_ENU_F, SPEED_ENU_I, SPEED_HNORM_F, SPEED_HNORM_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, state, NedCoor_i::x, EnuCoor_i::x, NedCoor_i::y, and EnuCoor_i::y.
Referenced by stateGetHorizontalSpeedNorm_i().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1127 of file state.c.
References ecef_of_ned_vect_f(), State::ecef_speed_f, foo, State::ned_origin_f, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_FLOAT_OF_BFP, and state.
Referenced by stateGetSpeedEcef_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 925 of file state.c.
References ecef_of_ned_vect_i(), State::ecef_speed_f, State::ecef_speed_i, foo, State::ned_origin_i, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_BFP_OF_REAL, and state.
Referenced by stateGetSpeedEcef_i().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1077 of file state.c.
References State::ecef_speed_f, State::ecef_speed_i, enu_of_ecef_vect_f(), State::enu_speed_f, State::enu_speed_i, foo, State::ned_initialized_f, State::ned_origin_f, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_ENU_F, SPEED_ENU_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_FLOAT_OF_BFP, state, State::utm_initialized_f, and VECT3_ENU_OF_NED.
Referenced by stateGetSpeedEnu_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 873 of file state.c.
References State::ecef_speed_f, State::ecef_speed_i, enu_of_ecef_vect_i(), State::enu_speed_f, State::enu_speed_i, foo, INT32_VECT3_ENU_OF_NED, State::ned_initialized_i, State::ned_origin_i, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_ENU_F, SPEED_ENU_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_BFP_OF_REAL, state, and State::utm_initialized_f.
Referenced by stateGetSpeedEnu_i().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1027 of file state.c.
References State::ecef_speed_f, State::ecef_speed_i, State::enu_speed_f, State::enu_speed_i, foo, State::ned_initialized_f, ned_of_ecef_vect_f(), State::ned_origin_f, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_ENU_F, SPEED_ENU_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_FLOAT_OF_BFP, state, State::utm_initialized_f, and VECT3_NED_OF_ENU.
Referenced by stateGetSpeedNed_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 823 of file state.c.
References State::ecef_speed_f, State::ecef_speed_i, State::enu_speed_f, State::enu_speed_i, foo, INT32_VECT3_NED_OF_ENU, State::ned_initialized_i, ned_of_ecef_vect_i(), State::ned_origin_i, State::ned_speed_f, State::ned_speed_i, SPEED_ECEF_F, SPEED_ECEF_I, SPEED_ENU_F, SPEED_ENU_I, SPEED_NED_F, SPEED_NED_I, State::speed_status, SPEEDS_BFP_OF_REAL, state, and State::utm_initialized_f.
Referenced by stateGetSpeedNed_i().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get acceleration in Body coordinates (int).
Definition at line 1094 of file state.h.
References State::body_accel_i, and state.
Referenced by ekf_aw_wrapper_fetch(), guidance_indi_propagate_filters(), guidance_indi_quadplane_propagate_filters(), hff_propagate(), lms_estimation(), logger_control_effectiveness_periodic(), oneloop_andi_propagate_filters(), send_body_rates_accel(), stabilization_indi_rate_run(), and wind_estimator_periodic().
Here is the caller graph for this function:Get dir of horizontal ground speed (float).
Definition at line 1085 of file state.h.
References foo, State::h_speed_dir_f, SPEED_HDIR_F, State::speed_status, state, and stateCalcHorizontalSpeedDir_f().
Referenced by calculate_wind_no_airspeed(), fly_to_xy(), formation_flight(), guidance_plane_attitude_from_nav(), gvf_low_level_getState(), gvf_parametric_control_2D(), h_ctl_course_loop(), home_direction(), nav_lace_run(), nav_rosette_run(), nav_survey_rectangle_init(), nav_trinity_run(), potential_task(), put_route(), recover_gps_data(), send_acinfo_lla(), send_minimal_com(), snav_init(), and tcas_periodic_task_1Hz().
Here is the call graph for this function: Here is the caller graph for this function:Get dir of horizontal ground speed (int).
Definition at line 1040 of file state.h.
References foo, State::h_speed_dir_i, SPEED_HDIR_I, State::speed_status, state, and stateCalcHorizontalSpeedDir_i().
Referenced by dc_send_command().
Here is the call graph for this function: Here is the caller graph for this function:Get norm of horizontal ground speed (float).
Definition at line 1076 of file state.h.
References foo, State::h_speed_norm_f, SPEED_HNORM_F, State::speed_status, state, and stateCalcHorizontalSpeedNorm_f().
Referenced by ArduIMU_periodicGPS(), calc_flight_time_left(), calculate_wind_no_airspeed(), draw_osd(), fly_to_xy(), formation_flight(), gls_run(), gvf_low_level_control_2D(), gvf_low_level_control_3D(), gvf_low_level_getState(), gvf_parametric_control_2D(), h_ctl_course_loop(), home_direction(), mavlink_send_vfr_hud(), monitor_task(), nav_approaching_xy(), nav_bungee_takeoff_run(), nav_circle_XY(), nav_glide_alt(), nav_launcher_run(), potential_task(), put_horizontal_speed(), recover_gps_data(), rover_guidance_run(), rover_guidance_steering_heading_ctrl(), rover_guidance_steering_speed_ctrl(), rover_holo_guidance_run(), send_acinfo_lla(), send_fp_min(), send_minimal_com(), tcas_periodic_task_1Hz(), v_ctl_climb_loop(), and v_ctl_landing_loop().
Here is the call graph for this function: Here is the caller graph for this function:Get norm of horizontal ground speed (int).
Definition at line 1031 of file state.h.
References foo, State::h_speed_norm_i, SPEED_HNORM_I, State::speed_status, state, and stateCalcHorizontalSpeedNorm_i().
Referenced by dc_send_command(), and hott_update_eam_msg().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get ground speed in ECEF coordinates (float).
Definition at line 1067 of file state.h.
References State::ecef_speed_f, foo, SPEED_ECEF_F, State::speed_status, state, and stateCalcSpeedEcef_f().
Here is the call graph for this function:
|
inlinestatic |
Get ground speed in ECEF coordinates (int).
Definition at line 1022 of file state.h.
References State::ecef_speed_i, foo, SPEED_ECEF_I, State::speed_status, state, and stateCalcSpeedEcef_i().
Here is the call graph for this function:Get ground speed in local ENU coordinates (float).
Definition at line 1058 of file state.h.
References State::enu_speed_f, foo, SPEED_ENU_F, State::speed_status, state, and stateCalcSpeedEnu_f().
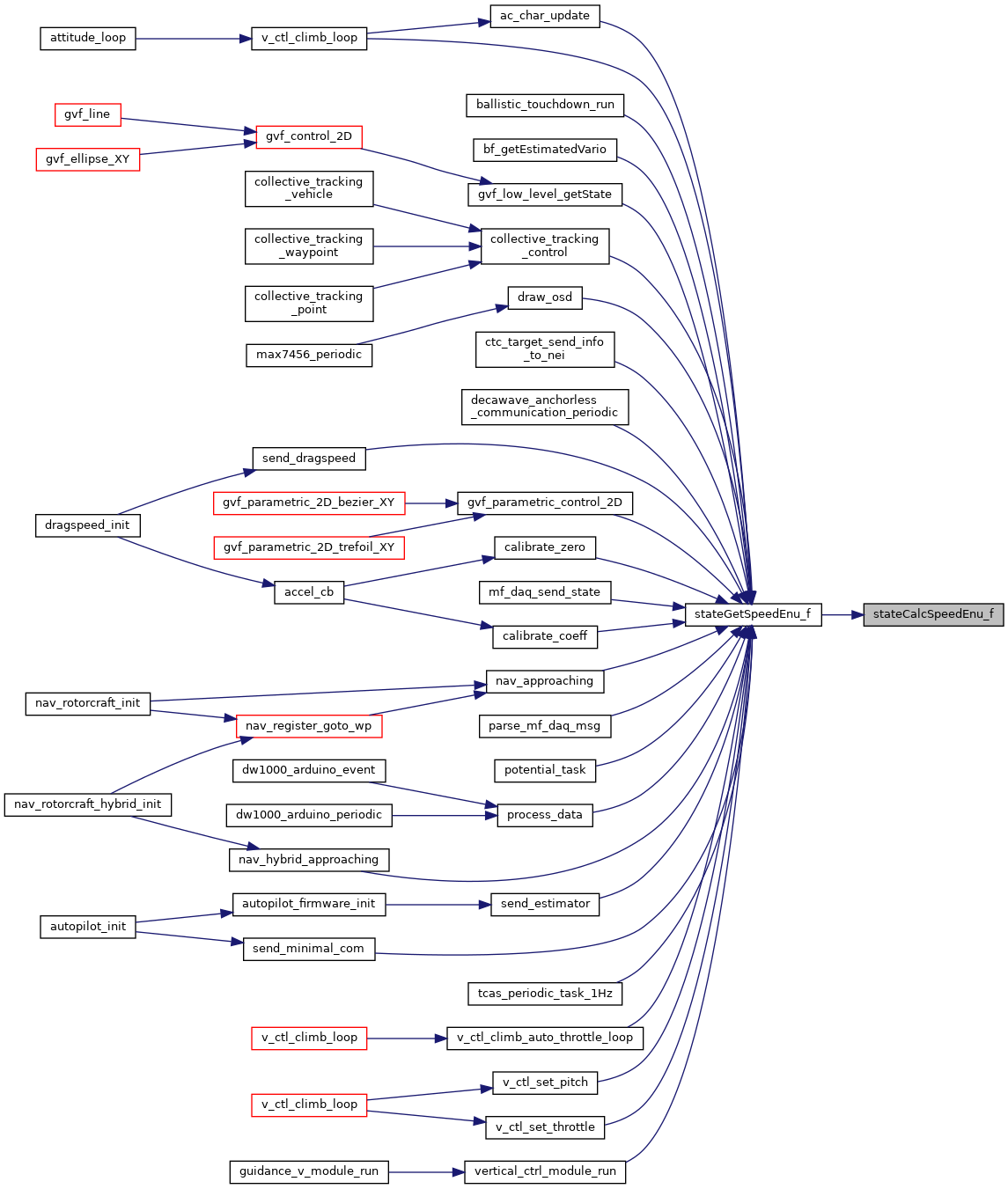
Referenced by ac_char_update(), ballistic_touchdown_run(), bf_getEstimatedVario(), calibrate_coeff(), calibrate_zero(), collective_tracking_control(), ctc_target_send_info_to_nei(), decawave_anchorless_communication_periodic(), draw_osd(), guidance_plane_set_pitch(), guidance_plane_set_throttle(), gvf_low_level_getState(), gvf_parametric_control_2D(), mf_daq_send_state(), nav_approaching(), nav_approaching(), nav_hybrid_approaching(), parse_mf_daq_msg(), potential_task(), process_data(), send_acinfo_lla(), send_dragspeed(), send_estimator(), send_minimal_com(), tcas_periodic_task_1Hz(), v_ctl_climb_auto_throttle_loop(), v_ctl_climb_loop(), v_ctl_set_pitch(), v_ctl_set_throttle(), and vertical_ctrl_module_run().
Here is the call graph for this function: Here is the caller graph for this function:Get ground speed in local ENU coordinates (int).
Definition at line 1013 of file state.h.
References State::enu_speed_i, foo, SPEED_ENU_I, State::speed_status, state, and stateCalcSpeedEnu_i().
Referenced by hott_update_eam_msg(), logger_control_effectiveness_periodic(), and send_fp().
Here is the call graph for this function: Here is the caller graph for this function:Get ground speed in local NED coordinates (float).
Definition at line 1049 of file state.h.
References foo, State::ned_speed_f, SPEED_NED_F, State::speed_status, state, and stateCalcSpeedNed_f().
Referenced by autopilot_in_flight_end_detection(), compute_accel_from_speed_sp(), ekf_aw_wrapper_fetch(), ground_detect_periodic(), guidance_indi_controller(), guidance_indi_controller(), guidance_indi_run_mode(), guidance_indi_run_mode(), ins_alt_float_update_baro(), logger_file_write_row(), mavlink_send_global_position_int(), mavlink_send_local_position_ned(), mavlink_send_vfr_hud(), OA_update(), oneloop_andi_propagate_filters(), print_true_state(), range_msg_callback(), save_speeds(), send_ins_flow(), stabilization_andi_enter(), stabilization_andi_run(), wind_estimation_quadrotor_periodic(), and wind_estimator_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Get ground speed in local NED coordinates (int).
Definition at line 1004 of file state.h.
References foo, State::ned_speed_i, SPEED_NED_I, State::speed_status, state, and stateCalcSpeedNed_i().
Referenced by computeOptiTrack(), guidance_h_update_reference(), guidance_hybrid_determine_wind_estimate(), guidance_pid_h_run_pos(), guidance_pid_h_run_speed(), guidance_pid_v_run(), guidance_v_from_nav(), guidance_v_guided_enter(), guidance_v_mode_changed(), guidance_v_set_th(), ins_vectornav_propagate(), reset_guidance_reference_from_current_position(), send_hover_loop(), send_hybrid_guidance(), and send_vert_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Set multiple speed coordinates (float).
Definition at line 977 of file state.h.
References State::ecef_speed_f, State::enu_speed_f, foo, State::ned_speed_f, SPEED_ECEF_F, SPEED_ENU_F, State::speed_input_filter, SPEED_NED_F, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
|
inlinestatic |
Set multiple speed coordinates (int).
Definition at line 922 of file state.h.
References State::ecef_speed_i, State::enu_speed_i, foo, State::ned_speed_i, SPEED_ECEF_I, SPEED_ENU_I, State::speed_input_filter, SPEED_NED_I, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
|
inlinestatic |
Set ground speed in ECEF coordinates (float).
Definition at line 967 of file state.h.
References State::ecef_speed_f, foo, SPEED_ECEF_F, State::speed_input_filter, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
|
inlinestatic |
Set ground speed in ECEF coordinates (int).
Definition at line 912 of file state.h.
References State::ecef_speed_i, foo, SPEED_ECEF_I, State::speed_input_filter, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Set ground speed in local ENU coordinates (float).
Definition at line 957 of file state.h.
References State::enu_speed_f, foo, SPEED_ENU_F, State::speed_input_filter, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Set ground speed in local ENU coordinates (int).
Definition at line 902 of file state.h.
References State::enu_speed_i, foo, SPEED_ENU_I, State::speed_input_filter, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Set ground speed in local NED coordinates (float).
Definition at line 947 of file state.h.
References foo, State::ned_speed_f, State::speed_input_filter, SPEED_NED_F, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Referenced by ekf_run(), gps_cb(), gps_cb(), gps_cb(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), ins_ekf2_update(), ins_float_invariant_propagate(), ins_vectornav_propagate(), set_state_from_ins(), and sim_overwrite_ins().
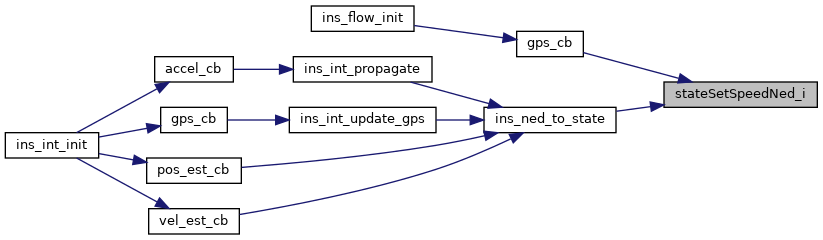
Here is the caller graph for this function:Set ground speed in local NED coordinates (int).
Definition at line 892 of file state.h.
References foo, State::ned_speed_i, State::speed_input_filter, SPEED_NED_I, State::speed_status, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Referenced by gps_cb(), gps_cb(), ins_ned_to_state(), and ins_ned_to_state().
Here is the caller graph for this function:| struct EcefCoor_f State::ecef_speed_f |
Velocity in EarthCenteredEarthFixed coordinates.
Units: m/s
Definition at line 331 of file state.h.
Referenced by stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEcef_f(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedEcef_f(), stateSetSpeed_f(), and stateSetSpeedEcef_f().
| struct EcefCoor_i State::ecef_speed_i |
Velocity in EarthCenteredEarthFixed coordinates.
Units: m/s in BFP with INT32_SPEED_FRAC
Definition at line 300 of file state.h.
Referenced by stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedEcef_i(), stateSetSpeed_i(), and stateSetSpeedEcef_i().
| struct EnuCoor_f State::enu_speed_f |
Velocity in East North Up coordinates.
Units: m/s
Definition at line 342 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedEnu_f(), stateSetSpeed_f(), and stateSetSpeedEnu_f().
| struct EnuCoor_i State::enu_speed_i |
Velocity in East North Up coordinates.
Units: m/s in BFP with INT32_SPEED_FRAC
Definition at line 312 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedEnu_i(), stateSetSpeed_i(), and stateSetSpeedEnu_i().
| float State::h_speed_dir_f |
Direction of horizontal ground speed.
Unit: rad (clockwise, zero=north)
Definition at line 354 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), and stateGetHorizontalSpeedDir_f().
| int32_t State::h_speed_dir_i |
Direction of horizontal ground speed.
Unit: rad in BFP with INT32_ANGLE_FRAC (clockwise, zero=north)
Definition at line 325 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), and stateGetHorizontalSpeedDir_i().
| float State::h_speed_norm_f |
Norm of horizontal ground speed.
Unit: m/s
Definition at line 348 of file state.h.
Referenced by stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), and stateGetHorizontalSpeedNorm_f().
| uint32_t State::h_speed_norm_i |
Norm of horizontal ground speed.
Unit: m/s in BFP with INT32_SPEED_FRAC
Definition at line 318 of file state.h.
Referenced by stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), and stateGetHorizontalSpeedNorm_i().
| struct NedCoor_f State::ned_speed_f |
speed in North East Down coordinates
Units: m/s
Definition at line 336 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEcef_f(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedNed_f(), stateSetSpeed_f(), and stateSetSpeedNed_f().
| struct NedCoor_i State::ned_speed_i |
Velocity in North East Down coordinates.
Units: m/s in BFP with INT32_SPEED_FRAC
Definition at line 306 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEcef_f(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetSpeedNed_i(), stateSetSpeed_i(), and stateSetSpeedNed_i().
| uint16_t State::speed_input_filter |
Holds the input filter id for speed.
Definition at line 294 of file state.h.
Referenced by stateInit(), stateSetInputFilter(), stateSetSpeed_f(), stateSetSpeed_i(), stateSetSpeedEcef_f(), stateSetSpeedEcef_i(), stateSetSpeedEnu_f(), stateSetSpeedEnu_i(), stateSetSpeedNed_f(), and stateSetSpeedNed_i().
| uint16_t State::speed_status |
Holds the status bits for all ground speed representations.
When the corresponding bit is one the representation is already computed.
Definition at line 289 of file state.h.
Referenced by stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcSpeedEcef_f(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedDir_i(), stateGetHorizontalSpeedNorm_f(), stateGetHorizontalSpeedNorm_i(), stateGetSpeedEcef_f(), stateGetSpeedEcef_i(), stateGetSpeedEnu_f(), stateGetSpeedEnu_i(), stateGetSpeedNed_f(), stateGetSpeedNed_i(), stateInit(), stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), stateSetSpeed_f(), stateSetSpeed_i(), stateSetSpeedEcef_f(), stateSetSpeedEcef_i(), stateSetSpeedEnu_f(), stateSetSpeedEnu_i(), stateSetSpeedNed_f(), and stateSetSpeedNed_i().