|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
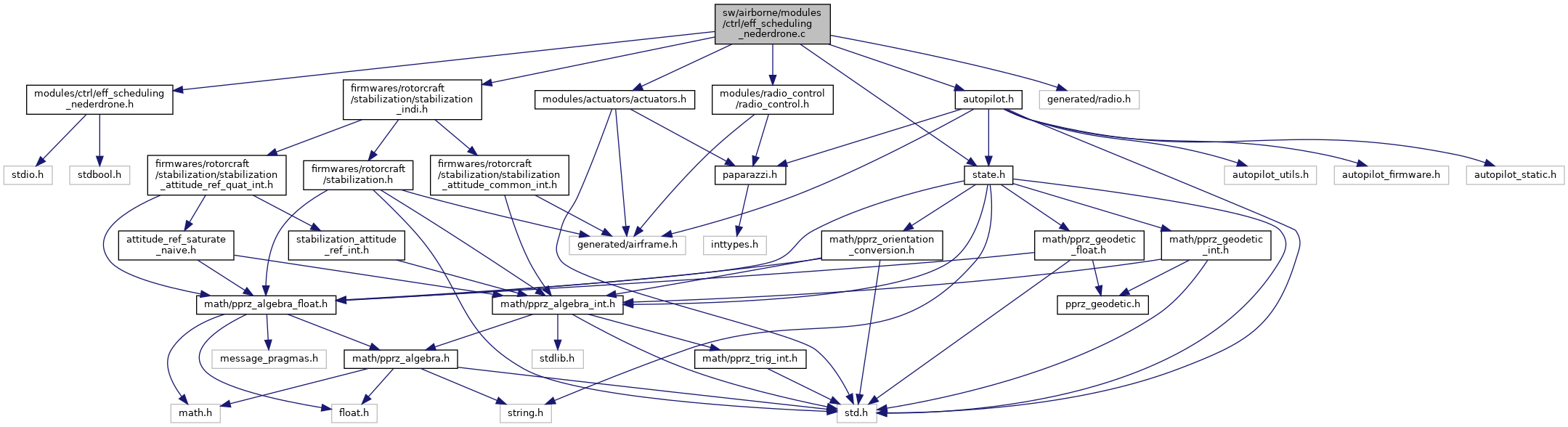
#include "modules/ctrl/eff_scheduling_nederdrone.h"#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "state.h"#include "autopilot.h"#include "modules/radio_control/radio_control.h"#include "modules/actuators/actuators.h" Include dependency graph for eff_scheduling_nederdrone.c:
Include dependency graph for eff_scheduling_nederdrone.c:Go to the source code of this file.
Macros | |
| #define | INDI_SCHEDULING_LOWER_BOUND_G1 0.0001 |
| #define | INDI_SCHEDULING_LOW_AIRSPEED 12.0 |
| #define | INDI_SCHEDULING_TRIM_ELEVATOR 0.0 |
| #define | INDI_SCHEDULING_TRIM_FLAPS 0.0 |
Functions | |
| void | schdule_control_effectiveness (void) |
| Function that calculates control effectiveness values for the Nederdrone inner loop. | |
| void | ctrl_eff_scheduling_init (void) |
| Initialises periodic loop;. | |
| void | ctrl_eff_scheduling_periodic (void) |
| Periodic function that interpolates between gain sets depending on the scheduling variable. | |
If instead using online adaptation is an option, be sure to not use this module at the same time!
Definition in file eff_scheduling_nederdrone.c.
| #define INDI_SCHEDULING_LOW_AIRSPEED 12.0 |
Definition at line 41 of file eff_scheduling_nederdrone.c.
| #define INDI_SCHEDULING_LOWER_BOUND_G1 0.0001 |
Definition at line 37 of file eff_scheduling_nederdrone.c.
| #define INDI_SCHEDULING_TRIM_ELEVATOR 0.0 |
Definition at line 49 of file eff_scheduling_nederdrone.c.
| #define INDI_SCHEDULING_TRIM_FLAPS 0.0 |
Definition at line 53 of file eff_scheduling_nederdrone.c.
Initialises periodic loop;.
Definition at line 92 of file eff_scheduling_nederdrone.c.
References foo, g_forward, g_hover, and INDI_G_SCALING.
Periodic function that interpolates between gain sets depending on the scheduling variable.
Definition at line 108 of file eff_scheduling_nederdrone.c.
References act_pref, schdule_control_effectiveness(), sched_ratio_tip_props, trim_elevator, and trim_flaps.
Here is the call graph for this function:Function that calculates control effectiveness values for the Nederdrone inner loop.
Default requency: 20 Hz.
Definition at line 131 of file eff_scheduling_nederdrone.c.
References actuators_pprz, all_act_fwd_sched, backwing_pitch_eff_scaling, backwing_thrust_eff_scaling, eulers_zxy, float_eulers_of_quat_zxy(), foo, g1g2, g_forward, g_hover, INDI_SCHEDULING_LOW_AIRSPEED, indi_Wu_original, pref_flaps_factor, RADIO_AUX2, radio_control, sched_ratio_tip_props, sched_tip_prop_lower_pitch_limit_deg, sched_tip_prop_upper_pitch_limit_deg, sched_tip_props_always_on, stateGetAirspeed_f(), stateGetNedToBodyQuat_f(), FloatEulers::theta, thrust_eff_scaling, use_scheduling, RadioControl::values, wls_stab_p, and WLS_t::Wu.
Referenced by ctrl_eff_scheduling_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 65 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float backwing_pitch_eff_scaling = 1.0 |
Definition at line 71 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float backwing_thrust_eff_scaling = 1.0 |
Definition at line 70 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
|
static |
Definition at line 73 of file eff_scheduling_nederdrone.c.
Referenced by ctrl_eff_scheduling_init(), and schdule_control_effectiveness().
|
static |
Definition at line 78 of file eff_scheduling_nederdrone.c.
Referenced by ctrl_eff_scheduling_init(), and schdule_control_effectiveness().
| float indi_Wu_original[INDI_NUM_ACT] = STABILIZATION_INDI_WLS_WU |
Definition at line 63 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float pref_flaps_factor = INDI_SCHEDULING_PREF_FLAPS_FACTOR |
Definition at line 61 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float sched_ratio_tip_props = 1.0 |
Definition at line 82 of file eff_scheduling_nederdrone.c.
Referenced by ctrl_eff_scheduling_periodic(), and schdule_control_effectiveness().
| float sched_tip_prop_lower_pitch_limit_deg = -65 |
Definition at line 86 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float sched_tip_prop_upper_pitch_limit_deg = -45 |
Definition at line 84 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
Definition at line 88 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float thrust_eff_scaling = 1.0 |
Definition at line 69 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().
| float trim_elevator = INDI_SCHEDULING_TRIM_ELEVATOR |
Definition at line 56 of file eff_scheduling_nederdrone.c.
Referenced by ctrl_eff_scheduling_periodic().
| float trim_flaps = INDI_SCHEDULING_TRIM_FLAPS |
Definition at line 57 of file eff_scheduling_nederdrone.c.
Referenced by ctrl_eff_scheduling_periodic().
| int32_t use_scheduling = 1 |
Definition at line 67 of file eff_scheduling_nederdrone.c.
Referenced by schdule_control_effectiveness().