|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
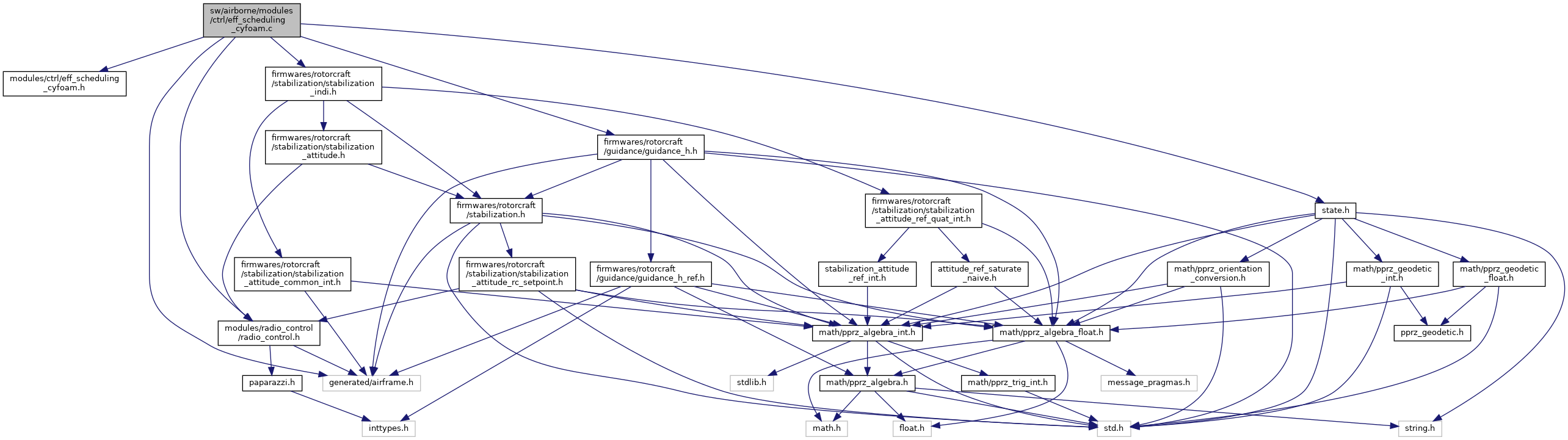
#include "modules/ctrl/eff_scheduling_cyfoam.h"#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "generated/airframe.h"#include "state.h"#include "modules/radio_control/radio_control.h" Include dependency graph for eff_scheduling_cyfoam.c:
Include dependency graph for eff_scheduling_cyfoam.c:Go to the source code of this file.
Functions | |
| void | eff_scheduling_cyfoam_init (void) |
| Initialises periodic loop;. | |
| static void | eff_scheduling_periodic_a (void) |
| static void | eff_scheduling_periodic_b (void) |
| void | eff_scheduling_cyfoam_periodic (void) |
| Periodic function that interpolates between gain sets depending on the scheduling variable. | |
Variables | |
| static float | g1g2_forward [INDI_OUTPUTS][INDI_NUM_ACT] |
| static float | g1g2_hover [INDI_OUTPUTS][INDI_NUM_ACT] |
| static float | g2_both [INDI_NUM_ACT] = STABILIZATION_INDI_G2 |
Initialises periodic loop;.
Definition at line 64 of file eff_scheduling_cyfoam.c.
References foo, g1g2_forward, g1g2_hover, g2_both, and INDI_G_SCALING.
Periodic function that interpolates between gain sets depending on the scheduling variable.
Definition at line 138 of file eff_scheduling_cyfoam.c.
References actuator_state_filt_vect, Bwls, eff_scheduling_periodic_a(), eff_scheduling_periodic_b(), foo, INDI_G_SCALING, radio_control, and RadioControl::values.
Here is the call graph for this function:Definition at line 82 of file eff_scheduling_cyfoam.c.
References foo, g1g2, g1g2_forward, g1g2_hover, stabilization, and Stabilization::transition_ratio.
Referenced by eff_scheduling_cyfoam_periodic().
Here is the caller graph for this function:Definition at line 94 of file eff_scheduling_cyfoam.c.
References actuator_state_filt_vect, Indi_gains::att, eulers_zxy, float_eulers_of_quat_zxy(), foo, g1g2, g1g2_hover, indi_gains, FloatRates::q, stateGetAirspeed_f(), stateGetNedToBodyQuat_f(), FloatEulers::theta, and yaw_eff.
Referenced by eff_scheduling_cyfoam_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 43 of file eff_scheduling_cyfoam.c.
Referenced by eff_scheduling_cyfoam_init(), and eff_scheduling_periodic_a().
|
static |
Definition at line 54 of file eff_scheduling_cyfoam.c.
Referenced by eff_scheduling_cyfoam_init(), eff_scheduling_periodic_a(), and eff_scheduling_periodic_b().
|
static |
Definition at line 62 of file eff_scheduling_cyfoam.c.
Referenced by eff_scheduling_cyfoam_init().