|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
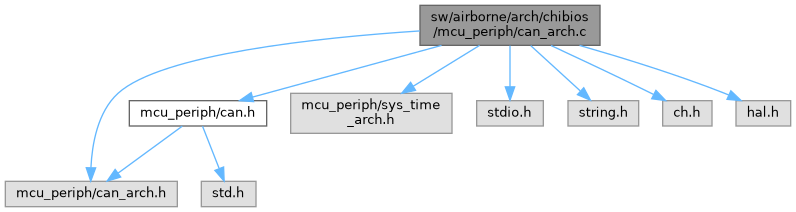
#include "mcu_periph/can_arch.h"#include "mcu_periph/can.h"#include "mcu_periph/sys_time.h"#include "stdio.h"#include "string.h"#include <ch.h>#include <hal.h> Include dependency graph for can_arch.c:
Include dependency graph for can_arch.c:Go to the source code of this file.
Data Structures | |
| struct | can_arch_periph |
Macros | |
| #define | USE_FDCAN_DRIVER ((STM32_CAN_USE_FDCAN1) || (STM32_CAN_USE_FDCAN2) || (STM32_CAN_USE_FDCAN3)) |
Functions | |
| static void | can_thd_rx (void *arg) |
| static void | can_start (struct can_periph *canp) |
| static bool | canConfigureIface (struct can_arch_periph *cas) |
| Try to compute the timing registers for the can interface and set the configuration. | |
| void | can_hw_init () |
| int | can_transmit_frame (struct pprzcan_frame *txframe, struct pprzaddr_can *addr) |
| struct can_arch_periph |
| #define USE_FDCAN_DRIVER ((STM32_CAN_USE_FDCAN1) || (STM32_CAN_USE_FDCAN2) || (STM32_CAN_USE_FDCAN3)) |
Definition at line 24 of file can_arch.c.
Definition at line 66 of file can_arch.c.
References can_start(), and foo.
Referenced by can_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 208 of file can_arch.c.
References can_thd_rx(), canConfigureIface(), and foo.
Referenced by can_hw_init().
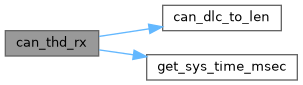
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 80 of file can_arch.c.
References can_dlc_to_len(), CAN_FRAME_EFF, CAN_FRAME_ERR, CAN_FRAME_RTR, pprzcan_frame::can_id, pprzaddr_can::can_ifindex, CAN_NB_CALLBACKS_MAX, CANFD_ESI, CANFD_FDF, foo, and status.
Referenced by can_start().
Here is the call graph for this function: Here is the caller graph for this function:| int can_transmit_frame | ( | struct pprzcan_frame * | txframe, |
| struct pprzaddr_can * | addr | ||
| ) |
Definition at line 159 of file can_arch.c.
References CAN_EID_MASK, CAN_FRAME_EFF, CAN_FRAME_RTR, pprzaddr_can::can_ifindex, can_len_to_dlc(), CAN_SID_MASK, foo, and frame.
Referenced by slcan_handle_frame(), and uavcan_tx().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Try to compute the timing registers for the can interface and set the configuration.
Definition at line 225 of file can_arch.c.
References foo.
Referenced by can_start().
Here is the caller graph for this function: