|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
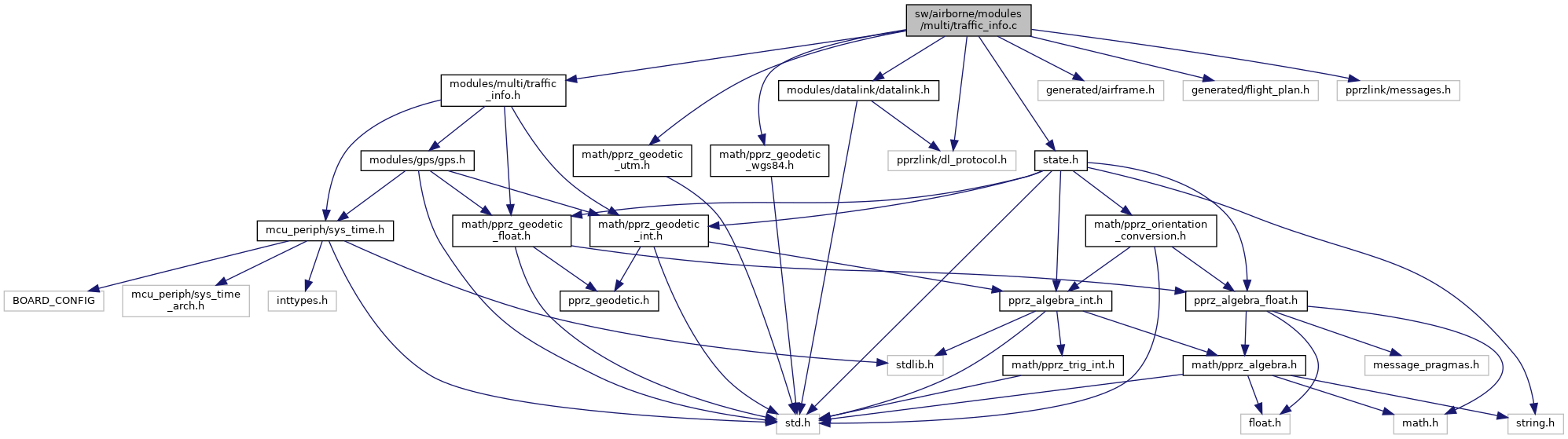
#include "modules/multi/traffic_info.h"#include "generated/airframe.h"#include "generated/flight_plan.h"#include "modules/datalink/datalink.h"#include "modules/datalink/telemetry.h"#include "pprzlink/dl_protocol.h"#include "pprzlink/messages.h"#include "state.h"#include "math/pprz_geodetic_utm.h"#include "math/pprz_geodetic_wgs84.h" Include dependency graph for traffic_info.c:
Include dependency graph for traffic_info.c:Go to the source code of this file.
Variables | |
| uint8_t | ti_acs_idx |
| uint8_t | ti_acs_id [NB_ACS_ID] |
| struct acInfo | ti_acs [NB_ACS] |
| int32_t | geoid_height |
Definition in file traffic_info.c.
|
static |
Definition at line 65 of file traffic_info.c.
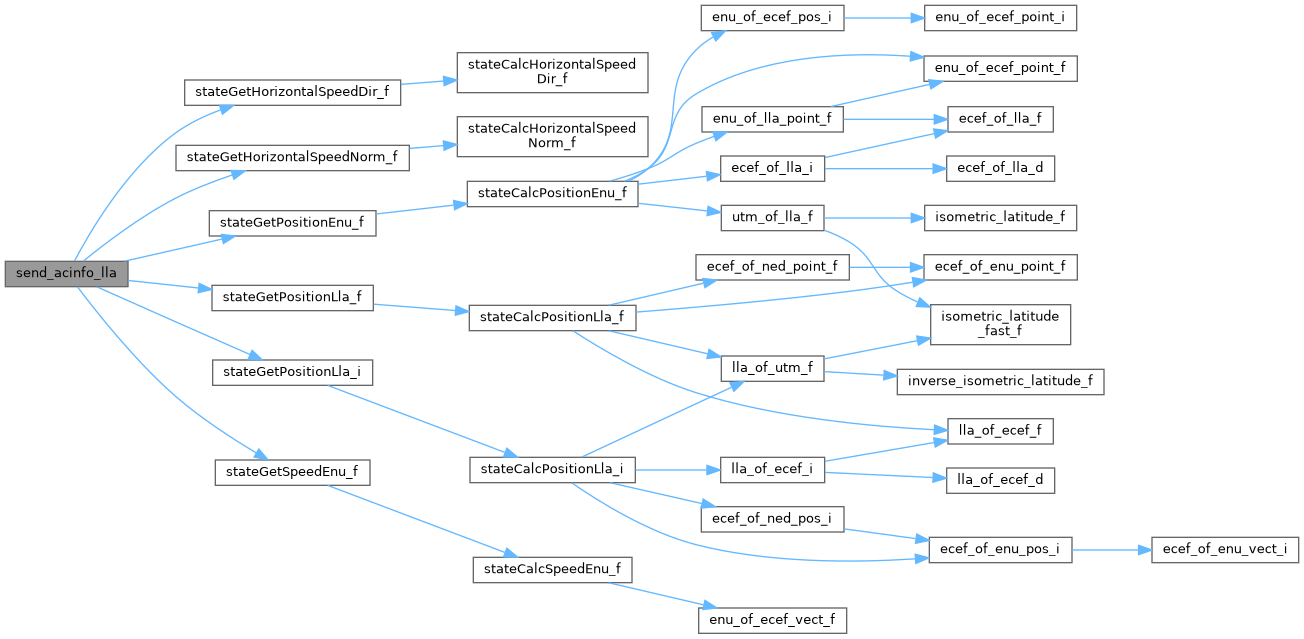
References LlaCoor_f::alt, LlaCoor_i::alt, course, dev, foo, gps, LlaCoor_f::lat, LlaCoor_i::lat, LogFileIsOpen, LogWrite, LlaCoor_f::lon, LlaCoor_i::lon, msg, pprzLogFile, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetPositionLla_f(), stateGetPositionLla_i(), stateGetSpeedEnu_f(), GpsState::tow, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Referenced by traffic_info_init().
Here is the call graph for this function: Here is the caller graph for this function:Update estimate of the geoid height Requires an available hsml and/or lla measurement, if not available value isn't updated.
Definition at line 120 of file traffic_info.c.
References LlaCoor_i::alt, foo, geoid_height, gps, GPS_VALID_HMSL_BIT, GPS_VALID_POS_LLA_BIT, GpsState::hmsl, LlaCoor_i::lat, GpsState::lla_pos, LlaCoor_i::lon, GpsState::valid_fields, and wgs84_ellipsoid_to_geoid_i().
Referenced by acInfoCalcPositionLla_f(), acInfoCalcPositionLla_i(), acInfoCalcPositionUtm_f(), and acInfoCalcPositionUtm_i().
Here is the call graph for this function: Here is the caller graph for this function:| int32_t geoid_height |
Definition at line 62 of file traffic_info.c.
Referenced by acInfoCalcPositionLla_f(), acInfoCalcPositionLla_i(), acInfoCalcPositionUtm_f(), acInfoCalcPositionUtm_i(), traffic_info_init(), and update_geoid_height().