|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Generic orientation representation and conversions. More...
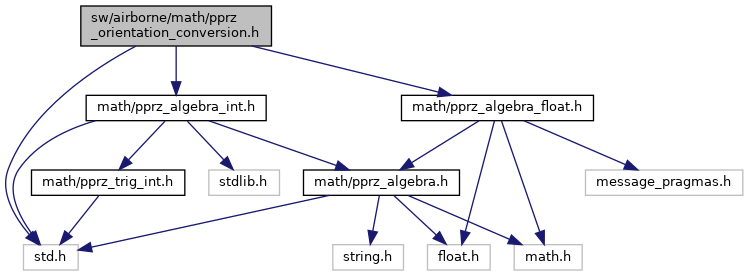
 Include dependency graph for pprz_orientation_conversion.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for pprz_orientation_conversion.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | OrientationReps |
Macros | |
| #define | ORREP_QUAT_I 0 |
| Quaternion (BFP int) | |
| #define | ORREP_EULER_I 1 |
| zyx Euler (BFP int) | |
| #define | ORREP_RMAT_I 2 |
| Rotation Matrix (BFP int) | |
| #define | ORREP_QUAT_F 3 |
| Quaternion (float) | |
| #define | ORREP_EULER_F 4 |
| zyx Euler (float) | |
| #define | ORREP_RMAT_F 5 |
| Rotation Matrix (float) | |
Functions | |
| void | orientationCalcQuat_i (struct OrientationReps *orientation) |
| void | orientationCalcRMat_i (struct OrientationReps *orientation) |
| void | orientationCalcEulers_i (struct OrientationReps *orientation) |
| void | orientationCalcQuat_f (struct OrientationReps *orientation) |
| void | orientationCalcRMat_f (struct OrientationReps *orientation) |
| void | orientationCalcEulers_f (struct OrientationReps *orientation) |
| static bool | orienationCheckValid (struct OrientationReps *orientation) |
| Test if orientations are valid. | |
| static void | orientationSetIdentity (struct OrientationReps *orientation) |
| Set to identity orientation. | |
| static void | orientationSetQuat_i (struct OrientationReps *orientation, struct Int32Quat *quat) |
| Set vehicle body attitude from quaternion (int). | |
| static void | orientationSetRMat_i (struct OrientationReps *orientation, struct Int32RMat *rmat) |
| Set vehicle body attitude from rotation matrix (int). | |
| static void | orientationSetEulers_i (struct OrientationReps *orientation, struct Int32Eulers *eulers) |
| Set vehicle body attitude from euler angles (int). | |
| static void | orientationSetQuat_f (struct OrientationReps *orientation, struct FloatQuat *quat) |
| Set vehicle body attitude from quaternion (float). | |
| static void | orientationSetRMat_f (struct OrientationReps *orientation, struct FloatRMat *rmat) |
| Set vehicle body attitude from rotation matrix (float). | |
| static void | orientationSetEulers_f (struct OrientationReps *orientation, struct FloatEulers *eulers) |
| Set vehicle body attitude from euler angles (float). | |
| static struct Int32Quat * | orientationGetQuat_i (struct OrientationReps *orientation) |
| Get vehicle body attitude quaternion (int). | |
| static struct Int32RMat * | orientationGetRMat_i (struct OrientationReps *orientation) |
| Get vehicle body attitude rotation matrix (int). | |
| static struct Int32Eulers * | orientationGetEulers_i (struct OrientationReps *orientation) |
| Get vehicle body attitude euler angles (int). | |
| static struct FloatQuat * | orientationGetQuat_f (struct OrientationReps *orientation) |
| Get vehicle body attitude quaternion (float). | |
| static struct FloatRMat * | orientationGetRMat_f (struct OrientationReps *orientation) |
| Get vehicle body attitude rotation matrix (float). | |
| static struct FloatEulers * | orientationGetEulers_f (struct OrientationReps *orientation) |
| Get vehicle body attitude euler angles (float). | |
Generic orientation representation and conversions.
This file contains the functions to automatically convert between the different representations. They should normally not be used directly and instead the stateGet/Set interfaces used. Also see the Generic Orientation Representation page.
Definition in file pprz_orientation_conversion.h.