|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
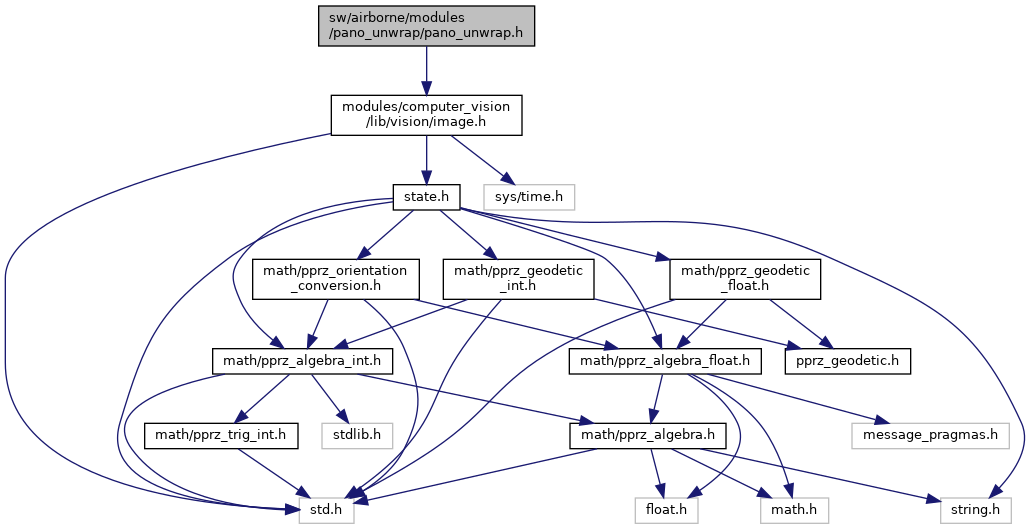
#include "modules/computer_vision/lib/vision/image.h" Include dependency graph for pano_unwrap.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for pano_unwrap.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | pano_unwrap_t |
Functions | |
| void | pano_unwrap_init (void) |
Variables | |
| struct pano_unwrap_t | pano_unwrap |
| struct image_t | pano_unwrapped_image |
| Unwrapped panoramic image. | |
Definition in file pano_unwrap.h.
| struct pano_unwrap_t |
Definition at line 31 of file pano_unwrap.h.
Collaboration diagram for pano_unwrap_t:| Data Fields | ||
|---|---|---|
| struct FloatVect2 | center | Center point of panoramic lens [fraction of image width, height]. |
| bool | derotate_attitude | Set to true if roll/pitch movement should be corrected. |
| bool | flip_horizontal | Set to true to horizontally flip the unwrapped image. |
| float | forward_direction | Angle [deg] in raw image that corresponds to the forward direction, where 0 points right and the value increases counterclockwise. |
| uint16_t | height | Height of unwrapped image. Set to 0 (default) to determine automatically from unwrapped_width, radius_bottom, _top and vertical_resolution. |
| bool | overwrite_video_thread | Set to true if the unwrapped image should be returned to the video thread. |
| float | radius_bottom | Distance from center point to bottom of region of interest [fraction of image height]. |
| float | radius_top | Distance from center point to top of region of interest [fraction of image height]. |
| bool | show_calibration | Draw calibration pattern on raw image. |
| float | vertical_resolution | Vertical resolution of raw image in the region of interest, used for attitude derotation [fraction of image height/rad] (Note: negative values are allowed) |
| uint16_t | width | Width of unwrapped image. |
Definition at line 313 of file pano_unwrap.c.
References camera_cb(), cv_add_to_device(), image_create(), IMAGE_YUV422, PANO_UNWRAP_CAMERA, PANO_UNWRAP_FPS, pano_unwrapped_image, and set_output_image_size().
Here is the call graph for this function:
|
extern |
Definition at line 78 of file pano_unwrap.c.
Referenced by camera_cb(), set_output_image_size(), unwrap_LUT(), and update_LUT().
|
extern |
Unwrapped panoramic image.
Definition at line 99 of file pano_unwrap.c.
Referenced by camera_cb(), pano_unwrap_init(), set_output_image_size(), and update_LUT().