|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
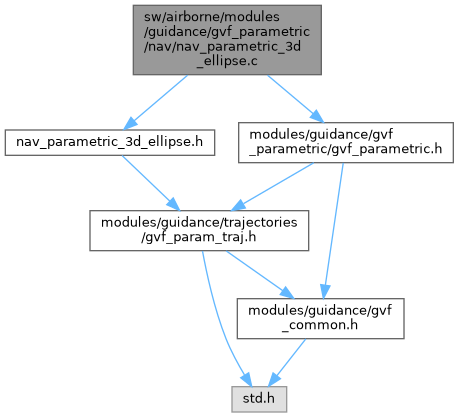
 Include dependency graph for nav_parametric_3d_ellipse.c:
Include dependency graph for nav_parametric_3d_ellipse.c:Go to the source code of this file.
Macros | |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_KX 0.001 |
| Guiding vector field algorithm for 2D and 3D complex trajectories. | |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_KY 0.001 |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_KZ 0.001 |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_R 80 |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_ZL 40 |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_ZH 40 |
| #define | GVF_PARAMETRIC_3D_ELLIPSE_ALPHA 0 |
Variables | |
| gvf_par_3d_ell_par | gvf_parametric_3d_ellipse_par |
| #define GVF_PARAMETRIC_3D_ELLIPSE_ALPHA 0 |
Default orientation in degrees for the lowest point of the ellipse
Definition at line 74 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_KX 0.001 |
Guiding vector field algorithm for 2D and 3D complex trajectories.
3D ellipse (intersection between a cylinder and a tilted plane)
Default gain kx for the 3d ellipse trajectory
Definition at line 35 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_KY 0.001 |
Default gain ky for the 3d ellipse trajectory
Definition at line 44 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_KZ 0.001 |
Default gain kz for the 3d ellipse trajectory
Definition at line 53 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_R 80 |
Default radius of the cylinder
Definition at line 59 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_ZH 40 |
Default highest point for the ellipse trajectory
Definition at line 69 of file nav_parametric_3d_ellipse.c.
| #define GVF_PARAMETRIC_3D_ELLIPSE_ZL 40 |
Default highest point for the ellipse trajectory
Definition at line 64 of file nav_parametric_3d_ellipse.c.
| gvf_par_3d_ell_par gvf_parametric_3d_ellipse_par |
Definition at line 77 of file nav_parametric_3d_ellipse.c.