|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
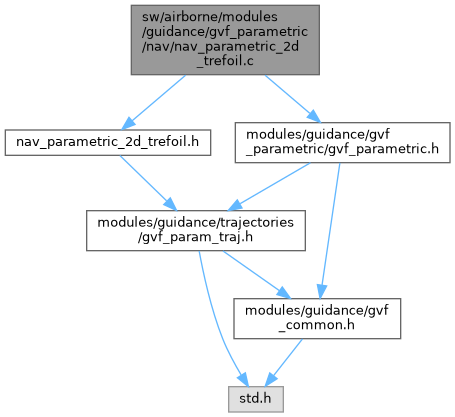
 Include dependency graph for nav_parametric_2d_trefoil.c:
Include dependency graph for nav_parametric_2d_trefoil.c:Go to the source code of this file.
Macros | |
| #define | GVF_PARAMETRIC_2D_TREFOIL_KX 0.001 |
| Guiding vector field algorithm for 2D and 3D complex trajectories. | |
| #define | GVF_PARAMETRIC_2D_TREFOIL_KY 0.001 |
| #define | GVF_PARAMETRIC_2D_TREFOIL_W1 0.02 |
| #define | GVF_PARAMETRIC_2D_TREFOIL_W2 0.03 |
| #define | GVF_PARAMETRIC_2D_TREFOIL_RATIO 160 |
| #define | GVF_PARAMETRIC_2D_TREFOIL_R 80 |
| #define | GVF_PARAMETRIC_2D_TREFOIL_ALPHA 0 |
Functions | |
| bool | nav_gvf_parametric_2D_trefoil_XY (float xo, float yo, float w1, float w2, float ratio, float r, float alpha) |
| bool | nav_gvf_parametric_2D_trefoil_wp (uint8_t wp, float w1, float w2, float ratio, float r, float alpha) |
Variables | |
| gvf_par_2d_tre_par | gvf_parametric_2d_trefoil_par |
| static int | gvf_parametric_p_len_wps = 0 |
| #define GVF_PARAMETRIC_2D_TREFOIL_ALPHA 0 |
Default orientation for the 2d trefoil trajectory
Definition at line 70 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_KX 0.001 |
Guiding vector field algorithm for 2D and 3D complex trajectories.
2D trefoil know
Default gain kx for the 2d trefoil knot trajectory
Definition at line 35 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_KY 0.001 |
Default gain ky for the 2d trefoil knot trajectory
Definition at line 44 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_R 80 |
Default radius of the circles for the 2d trefoil trajectory
Definition at line 65 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_RATIO 160 |
Default ratio for the 2d trefoil trajectory
Definition at line 60 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_W1 0.02 |
Default 1st frequency for the 2d trefoil trajectory
Definition at line 50 of file nav_parametric_2d_trefoil.c.
| #define GVF_PARAMETRIC_2D_TREFOIL_W2 0.03 |
Default 2nd frequency for the 2d trefoil trajectory
Definition at line 55 of file nav_parametric_2d_trefoil.c.
| bool nav_gvf_parametric_2D_trefoil_wp | ( | uint8_t | wp, |
| float | w1, | ||
| float | w2, | ||
| float | ratio, | ||
| float | r, | ||
| float | alpha | ||
| ) |
Definition at line 109 of file nav_parametric_2d_trefoil.c.
References alpha, gvf_parametric_p_len_wps, gvf_parametric_trajectory, nav_gvf_parametric_2D_trefoil_XY(), gvf_parametric_tra::p_parametric, WaypointX, and WaypointY.
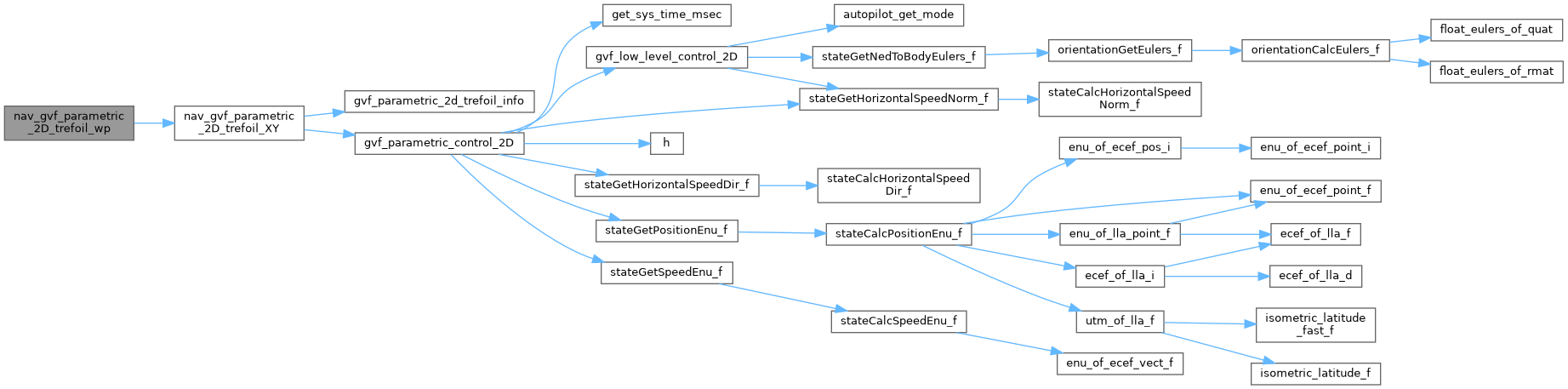
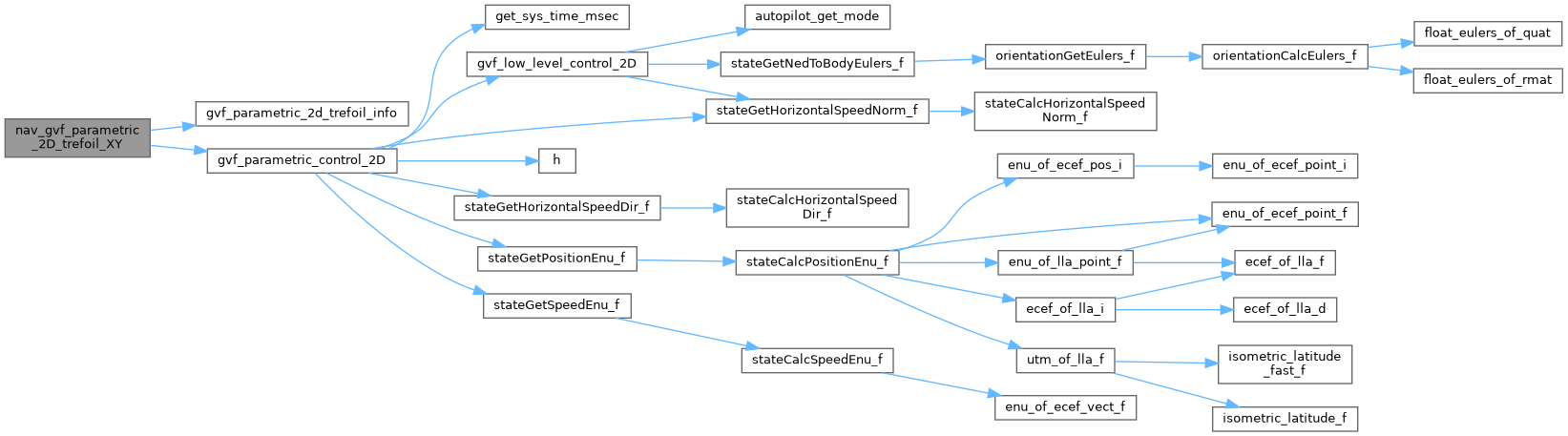
Here is the call graph for this function:| bool nav_gvf_parametric_2D_trefoil_XY | ( | float | xo, |
| float | yo, | ||
| float | w1, | ||
| float | w2, | ||
| float | ratio, | ||
| float | r, | ||
| float | alpha | ||
| ) |
Definition at line 86 of file nav_parametric_2d_trefoil.c.
References alpha, gvf_parametric_con::beta, foo, gvf_parametric_2d_trefoil_info(), gvf_parametric_2d_trefoil_par, gvf_parametric_control, gvf_parametric_control_2D(), gvf_parametric_p_len_wps, gvf_parametric_trajectory, gvf_par_2d_tre_par::kx, gvf_par_2d_tre_par::ky, gvf_parametric_tra::p_len, gvf_parametric_tra::p_parametric, gvf_parametric_con::s, TREFOIL_2D, gvf_parametric_tra::type, and gvf_parametric_con::w.
Referenced by nav_gvf_parametric_2D_trefoil_wp().
Here is the call graph for this function: Here is the caller graph for this function:| gvf_par_2d_tre_par gvf_parametric_2d_trefoil_par |
Definition at line 73 of file nav_parametric_2d_trefoil.c.
Referenced by nav_gvf_parametric_2D_trefoil_XY().
|
static |
Definition at line 80 of file nav_parametric_2d_trefoil.c.
Referenced by nav_gvf_parametric_2D_trefoil_wp(), and nav_gvf_parametric_2D_trefoil_XY().