|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
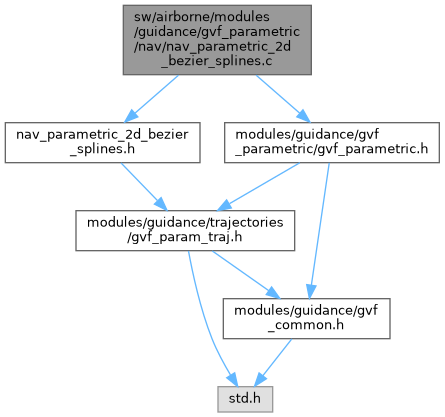
#include "nav_parametric_2d_bezier_splines.h"#include "modules/guidance/gvf_parametric/gvf_parametric.h" Include dependency graph for nav_parametric_2d_bezier_splines.c:
Include dependency graph for nav_parametric_2d_bezier_splines.c:Go to the source code of this file.
Macros | |
| #define | GVF_PARAMETRIC_2D_BEZIER_SPLINES_KX 2.0 |
| #define | GVF_PARAMETRIC_2D_BEZIER_SPLINES_KY 2.0 |
Functions | |
| static void | create_bezier_spline (bezier_t *bezier, float *px, float *py) |
| bool | nav_gvf_parametric_2D_bezier_run (void) |
| bool | nav_gvf_parametric_2D_bezier_wp (uint8_t first_wp) |
Variables | |
| gvf_par_2d_bezier_par | gvf_parametric_2d_bezier_par |
| bezier_t | gvf_bezier_2D [GVF_PARAMETRIC_2D_BEZIER_N_SEG] |
| #define GVF_PARAMETRIC_2D_BEZIER_SPLINES_KX 2.0 |
Definition at line 25 of file nav_parametric_2d_bezier_splines.c.
| #define GVF_PARAMETRIC_2D_BEZIER_SPLINES_KY 2.0 |
Definition at line 29 of file nav_parametric_2d_bezier_splines.c.
Definition at line 41 of file nav_parametric_2d_bezier_splines.c.
References foo, GVF_PARAMETRIC_2D_BEZIER_N_SEG, and bezier_t::p0.
Referenced by nav_gvf_parametric_2D_bezier_wp().
Here is the caller graph for this function:Definition at line 64 of file nav_parametric_2d_bezier_splines.c.
References BEZIER_2D, foo, gvf_bezier_2D, gvf_parametric_2d_bezier_par, gvf_parametric_2d_bezier_splines_info(), gvf_parametric_control, gvf_parametric_control_2D(), gvf_parametric_trajectory, gvf_par_2d_bezier_par::kx, gvf_par_2d_bezier_par::ky, gvf_parametric_tra::type, and gvf_parametric_con::w.
Referenced by nav_gvf_parametric_2D_bezier_wp().
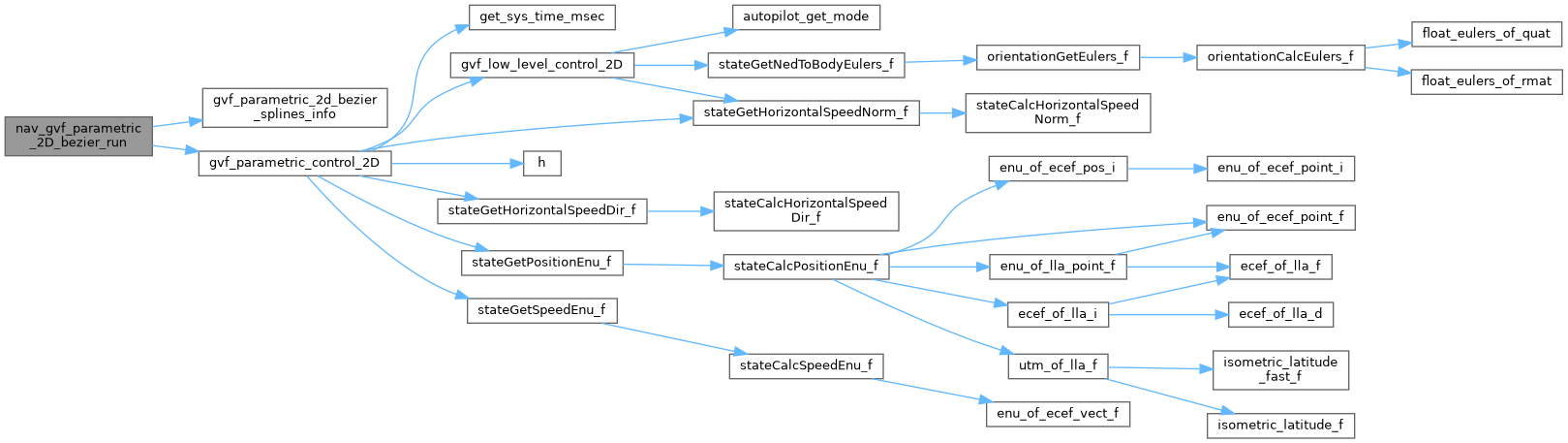
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 77 of file nav_parametric_2d_bezier_splines.c.
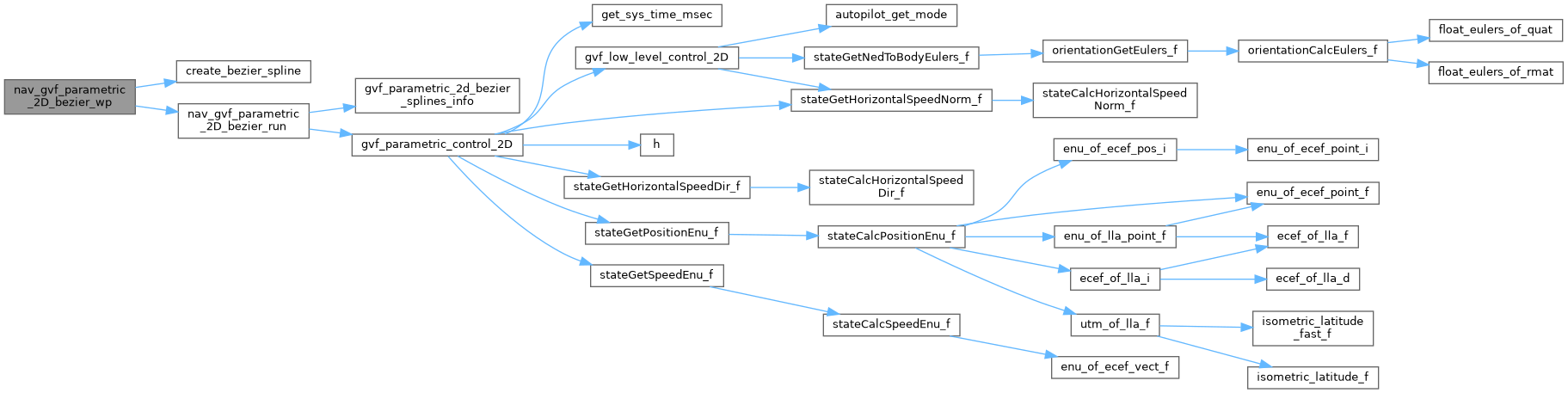
References gvf_parametric_con::beta, create_bezier_spline(), foo, gvf_bezier_2D, GVF_PARAMETRIC_2D_BEZIER_N_SEG, gvf_parametric_2d_bezier_par, gvf_parametric_control, gvf_parametric_telemetry, gvf_parametric_trajectory, gvf_par_2d_bezier_par::kx, gvf_par_2d_bezier_par::ky, nav_gvf_parametric_2D_bezier_run(), gvf_parametric_tra::p_len, gvf_parametric_tra::p_parametric, gvf_parametric_tel::splines_ctr, gvf_parametric_con::w, WaypointX, and WaypointY.
Here is the call graph for this function:| bezier_t gvf_bezier_2D[GVF_PARAMETRIC_2D_BEZIER_N_SEG] |
Definition at line 36 of file nav_parametric_2d_bezier_splines.c.
Referenced by nav_gvf_parametric_2D_bezier_run(), and nav_gvf_parametric_2D_bezier_wp().
| gvf_par_2d_bezier_par gvf_parametric_2d_bezier_par |
Definition at line 32 of file nav_parametric_2d_bezier_splines.c.
Referenced by nav_gvf_parametric_2D_bezier_run(), and nav_gvf_parametric_2D_bezier_wp().