|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
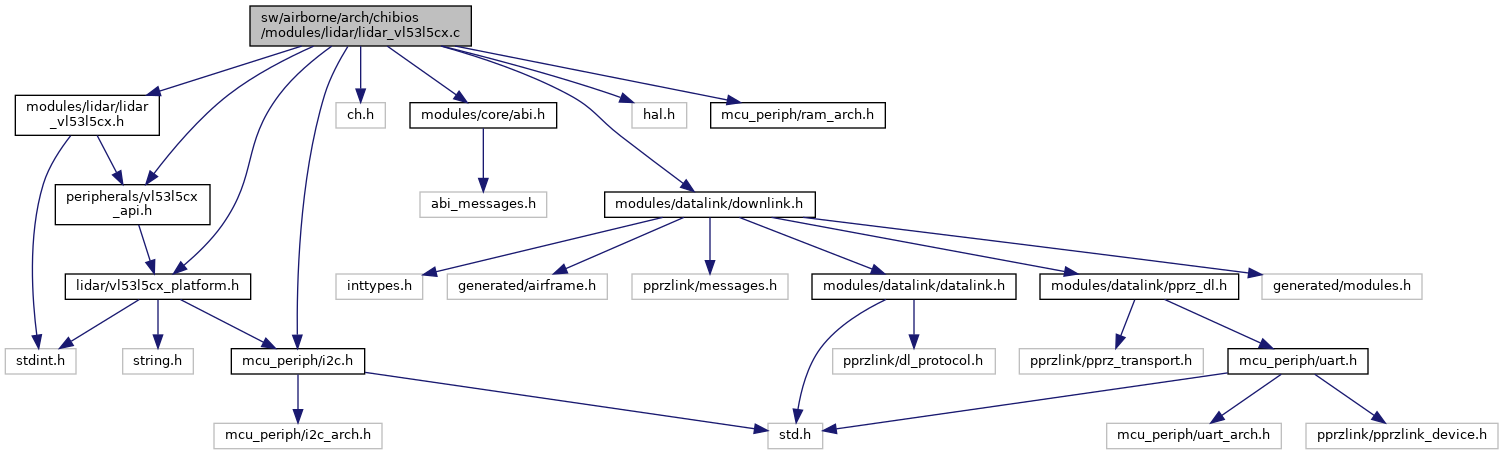
#include "modules/lidar/lidar_vl53l5cx.h"#include "mcu_periph/i2c.h"#include "ch.h"#include "lidar/vl53l5cx_platform.h"#include "peripherals/vl53l5cx_api.h"#include "modules/core/abi.h"#include "modules/datalink/downlink.h"#include "hal.h"#include "mcu_periph/ram_arch.h" Include dependency graph for lidar_vl53l5cx.c:
Include dependency graph for lidar_vl53l5cx.c:Go to the source code of this file.
Macros | |
| #define | LIDAR_VL53L5CX_I2C_ADDR 0x29 |
| #define | SUBTYPE_DISTANCE 0 |
Variables | |
| char * | VL53L5CX_ERROR_MSGS [] |
Definition in file lidar_vl53l5cx.c.
| #define LIDAR_VL53L5CX_I2C_ADDR 0x29 |
Definition at line 38 of file lidar_vl53l5cx.c.
| #define SUBTYPE_DISTANCE 0 |
Definition at line 41 of file lidar_vl53l5cx.c.
|
static |
|
static |
Definition at line 59 of file lidar_vl53l5cx.c.
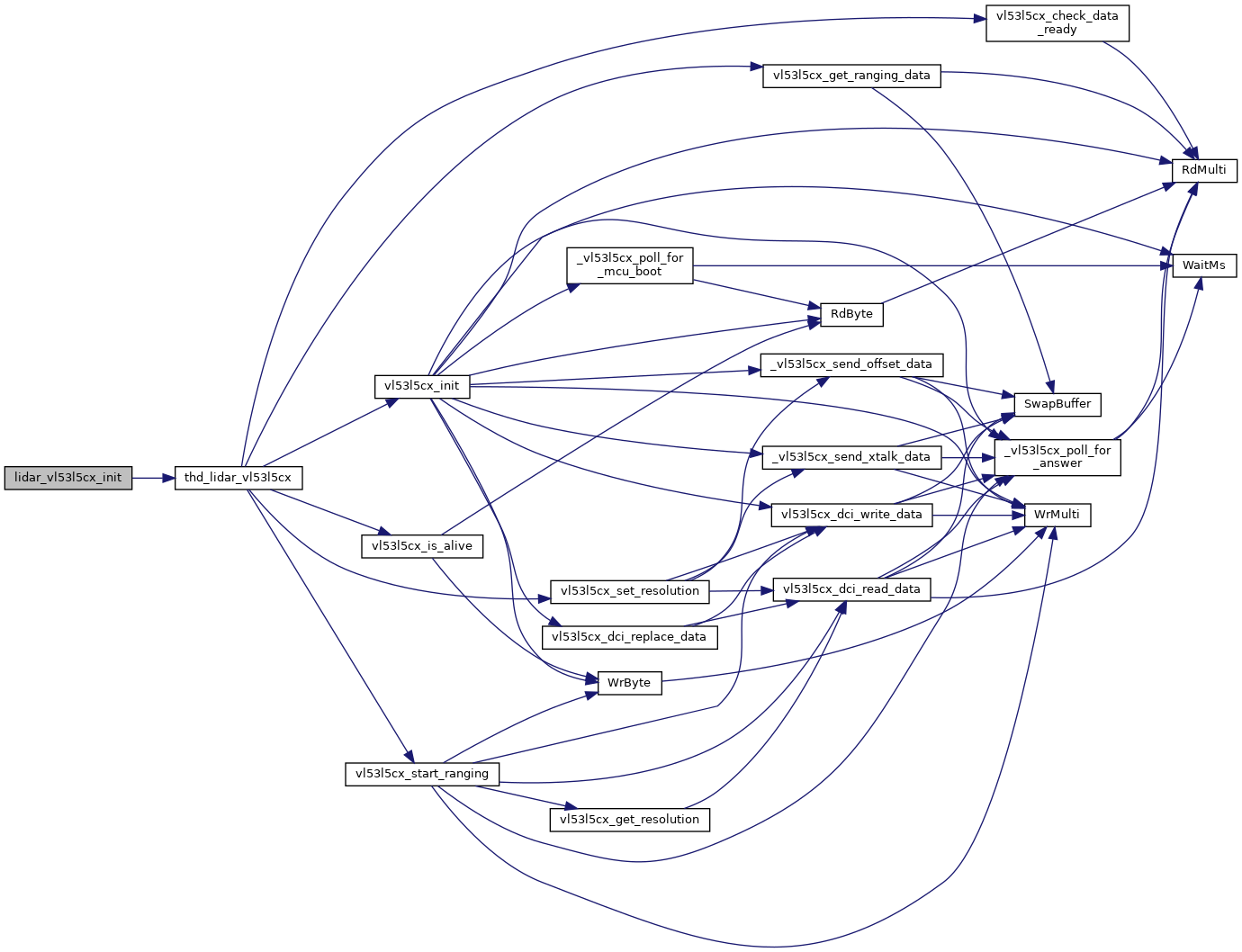
References foo, LIDAR_VL53L5CX_I2C_ADDR, thd_lidar_vl53l5cx(), and VL53L5CX_NO_ERROR.
Here is the call graph for this function:Definition at line 71 of file lidar_vl53l5cx.c.
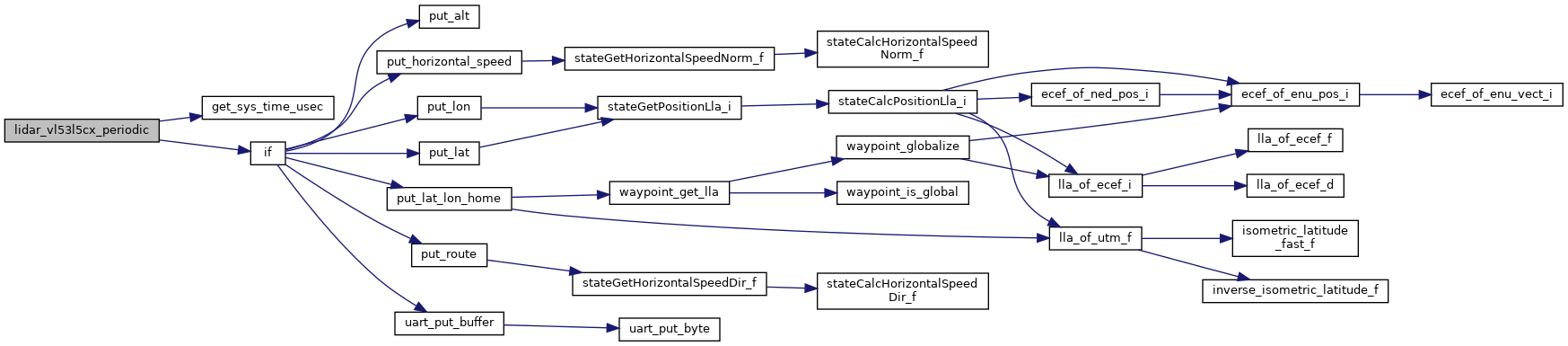
References DefaultChannel, DefaultDevice, foo, get_sys_time_usec(), LIDAR_DATA_VL53L5CX_ID, SUBTYPE_DISTANCE, and VL53L5CX_ERROR_MSGS.
Here is the call graph for this function:Definition at line 106 of file lidar_vl53l5cx.c.
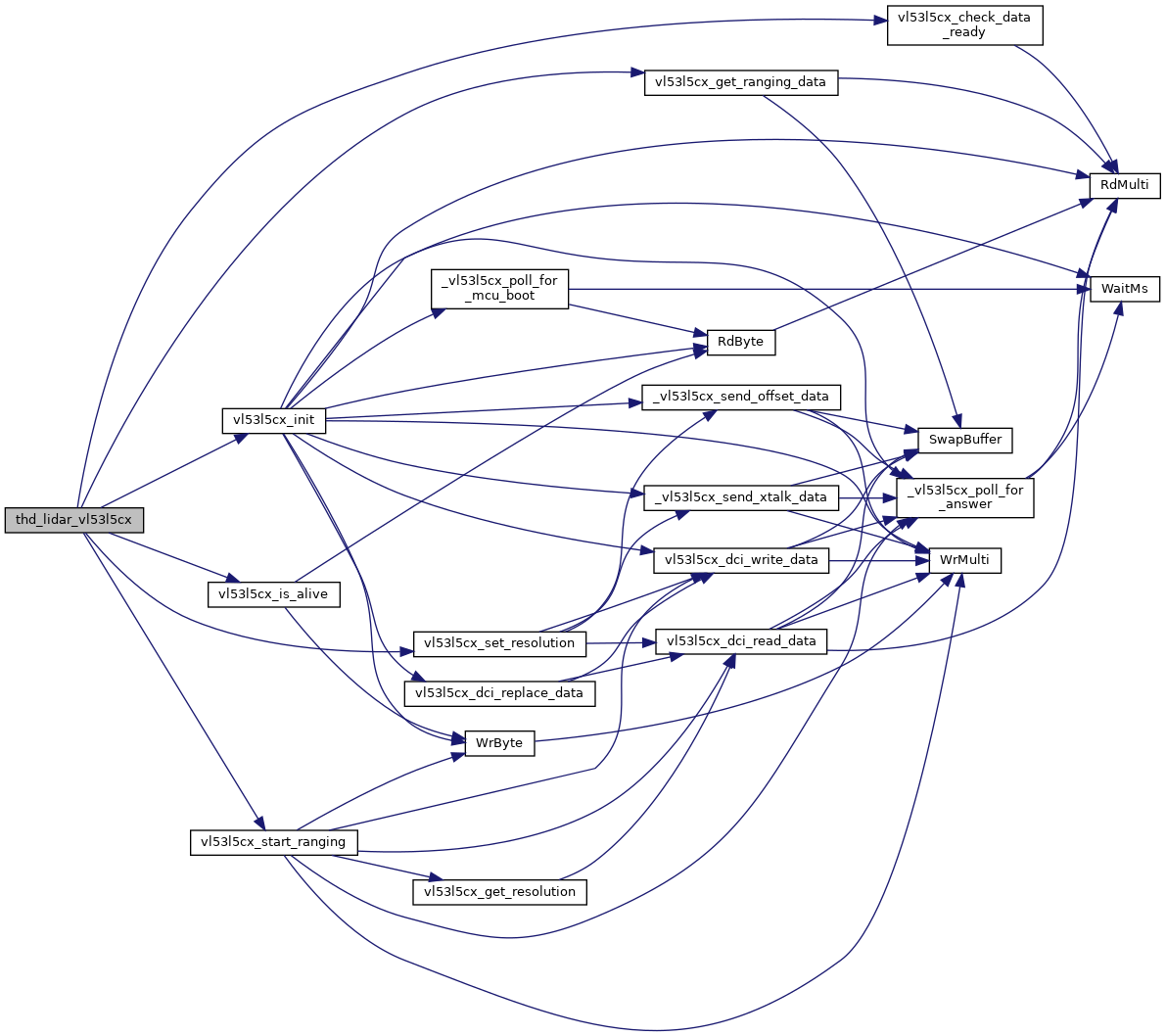
References dev, foo, status, vl53l5cx_check_data_ready(), vl53l5cx_get_ranging_data(), vl53l5cx_init(), vl53l5cx_is_alive(), VL53L5CX_NOT_DETECTED, VL53L5CX_RESOLUTION_4X4, vl53l5cx_set_resolution(), VL53L5CX_SET_RESOLUTION_FAILED, vl53l5cx_start_ranging(), and VL53L5CX_ULD_LOADING_FAILED.
Referenced by lidar_vl53l5cx_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
| char* VL53L5CX_ERROR_MSGS[] |
Definition at line 50 of file lidar_vl53l5cx.c.
Referenced by lidar_vl53l5cx_periodic().