|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Encode images with the use of the JPEG encoding. More...
 Include dependency graph for jpeg.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for jpeg.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | FOUR_ZERO_ZERO 0 |
| #define | FOUR_TWO_ZERO 1 |
| #define | FOUR_TWO_TWO 2 |
| #define | FOUR_FOUR_FOUR 3 |
| #define | RGB 4 |
Functions | |
| void | jpeg_encode_image (struct image_t *in, struct image_t *out, uint32_t quality_factor, bool add_dri_header) |
| Encode an YUV422 image. | |
| int | jpeg_create_svs_header (unsigned char *buf, int32_t size, int w) |
Encode images with the use of the JPEG encoding.
Definition in file jpeg.h.
| void jpeg_encode_image | ( | struct image_t * | in, |
| struct image_t * | out, | ||
| uint32_t | quality_factor, | ||
| bool | add_dri_header | ||
| ) |
Encode an YUV422 image.
| [in] | *in | The input image |
| [out] | *out | The output JPEG image |
| [in] | quality_factor | Quality factor of the encoding (0-99) |
| [in] | add_dri_header | Add the DRI header (needed for full JPEG) |
Definition at line 408 of file jpeg.c.
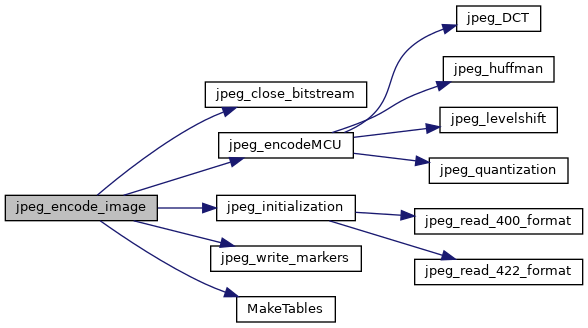
References image_t::buf, image_t::buf_size, foo, FOUR_TWO_TWO, FOUR_ZERO_ZERO, image_t::h, IMAGE_GRAYSCALE, IMAGE_YUV422, jpeg_close_bitstream(), jpeg_encodeMCU(), jpeg_initialization(), jpeg_write_markers(), MakeTables(), read_format, and image_t::w.
Referenced by save_shot_on_disk(), video_capture_save(), and viewvideo_function().
Here is the call graph for this function: Here is the caller graph for this function: