|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Inter-MCU interface. More...
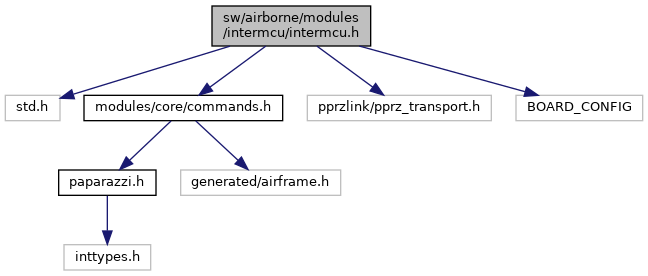
#include "std.h"#include "modules/core/commands.h"#include "pprzlink/pprz_transport.h"#include <BOARD_CONFIG> Include dependency graph for intermcu.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for intermcu.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | intermcu_t |
Macros | |
| #define | INTERMCU_LOST_CNT 25 /* 50ms with a 512Hz timer TODO fixed value */ |
| #define | INTERMCU_SET_CMD_STATUS(_bit) { intermcu.cmd_status |= (1 << _bit); } |
| #define | INTERMCU_CLR_CMD_STATUS(_bit) { intermcu.cmd_status &= ~(1 << _bit); } |
| #define | INTERMCU_GET_CMD_STATUS(_bit) (intermcu.cmd_status & (1 << _bit)) |
Enumerations | |
| enum | intermcu_status { INTERMCU_OK , INTERMCU_LOST } |
| enum | intermcu_cmd_status { INTERMCU_CMD_MOTORS_ON , INTERMCU_CMD_DISARM , INTERMCU_CMD_TIPPROPS , INTERMCU_CMD_FAILSAFE } |
Functions | |
| void | intermcu_init (void) |
| void | intermcu_periodic (void) |
| void | intermcu_event (void) |
Variables | |
| struct intermcu_t | intermcu |
Inter-MCU interface.
Definition in file intermcu.h.
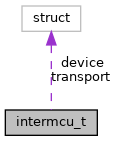
| struct intermcu_t |
Definition at line 69 of file intermcu.h.
Collaboration diagram for intermcu_t:| Data Fields | ||
|---|---|---|
| uint8_t | cmd_status | Command status information that is transfered (intermcu_cmd_status) |
| struct link_device * | device | Device used for communication. |
| bool | enabled | If the InterMCU communication is enabled. |
| bool | msg_available | If we have an InterMCU message. |
| enum intermcu_status | status | Status of the INTERMCU. |
| uint8_t | time_since_last_frame | Time since last frame. |
| struct pprz_transport | transport | Transport over communication line (PPRZ) |
Definition at line 65 of file intermcu.h.
Definition at line 66 of file intermcu.h.
Definition at line 35 of file intermcu.h.
Definition at line 64 of file intermcu.h.
Definition at line 56 of file intermcu.h.
| Enumerator | |
|---|---|
| INTERMCU_OK | InterMCU communication is OK. |
| INTERMCU_LOST | No interMCU communication anymore. |
Definition at line 41 of file intermcu.h.
Definition at line 95 of file intermcu_ap.c.
References datalink_nb_msgs, datalink_time, intermcu_t::device, dl_parse_msg(), intermcu_t::enabled, foo, imcu_msg_buf, intermcu, intermcu_dl_on_msg(), intermcu_t::msg_available, intermcu_t::time_since_last_frame, and intermcu_t::transport.
Referenced by main_fbw_event().
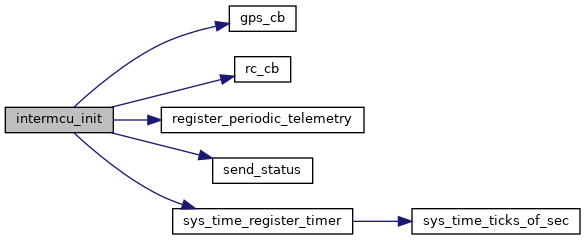
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 69 of file intermcu_ap.c.
References DefaultPeriodic, foo, gps_cb(), gps_ev, IMCU_GPS_ID, IMCU_RADIO_CONTROL_ID, intermcu, rc_cb(), rc_ev, register_periodic_telemetry(), send_status(), sys_time_register_timer(), and intermcu_t::transport.
Here is the call graph for this function:Definition at line 79 of file intermcu_ap.c.
References DefaultPeriodic, intermcu_t::device, foo, intermcu, INTERMCU_LOST, INTERMCU_LOST_CNT, intermcu_t::status, intermcu_t::time_since_last_frame, and intermcu_t::transport.
|
extern |
Definition at line 45 of file intermcu_ap.c.
Referenced by fbw_safety_check(), gps_cb(), intermcu_event(), intermcu_forward_uplink(), intermcu_init(), intermcu_parse_IMCU_COMMANDS(), intermcu_periodic(), intermcu_send_commands(), intermcu_send_spektrum_bind(), intermcu_send_status(), intermcu_set_enabled(), main_task_periodic(), opa_controller_periodic(), rc_cb(), and rc_cb().