|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft attitude reference generation in euler float version. More...
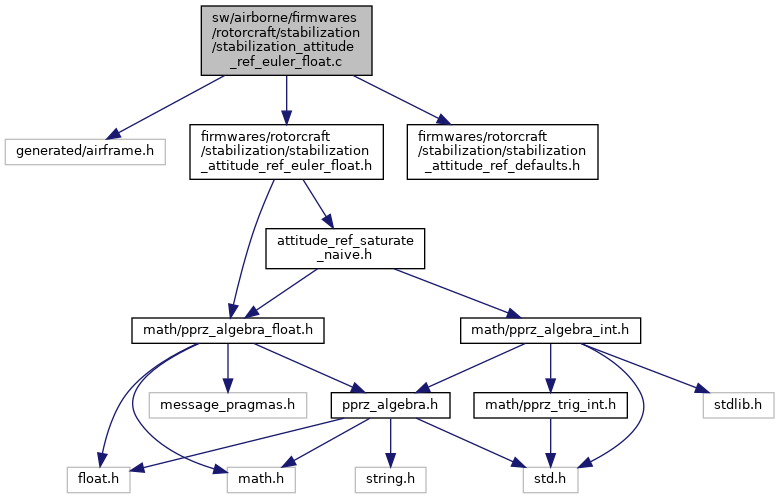
#include "generated/airframe.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_euler_float.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_defaults.h" Include dependency graph for stabilization_attitude_ref_euler_float.c:
Include dependency graph for stabilization_attitude_ref_euler_float.c:Go to the source code of this file.
Functions | |
| static void | reset_psi_ref (struct AttRefEulerFloat *ref, float psi) |
| void | attitude_ref_euler_float_init (struct AttRefEulerFloat *ref) |
| void | attitude_ref_euler_float_enter (struct AttRefEulerFloat *ref, float psi) |
| void | attitude_ref_euler_float_update (struct AttRefEulerFloat *ref, struct FloatEulers *sp_eulers, float dt) |
Rotorcraft attitude reference generation in euler float version.
Definition in file stabilization_attitude_ref_euler_float.c.
| void attitude_ref_euler_float_enter | ( | struct AttRefEulerFloat * | ref, |
| float | psi | ||
| ) |
Definition at line 62 of file stabilization_attitude_ref_euler_float.c.
References ref, and reset_psi_ref().
Referenced by stabilization_attitude_enter().
Here is the call graph for this function: Here is the caller graph for this function:| void attitude_ref_euler_float_init | ( | struct AttRefEulerFloat * | ref | ) |
Definition at line 41 of file stabilization_attitude_ref_euler_float.c.
References FLOAT_EULERS_ZERO, FLOAT_RATES_ZERO, foo, ref, STABILIZATION_ATTITUDE_REF_MAX_P, STABILIZATION_ATTITUDE_REF_MAX_PDOT, STABILIZATION_ATTITUDE_REF_MAX_Q, STABILIZATION_ATTITUDE_REF_MAX_QDOT, STABILIZATION_ATTITUDE_REF_MAX_R, and STABILIZATION_ATTITUDE_REF_MAX_RDOT.
Referenced by stabilization_attitude_euler_float_init().
Here is the caller graph for this function:| void attitude_ref_euler_float_update | ( | struct AttRefEulerFloat * | ref, |
| struct FloatEulers * | sp_eulers, | ||
| float | dt | ||
| ) |
Definition at line 67 of file stabilization_attitude_ref_euler_float.c.
References attitude_ref_float_saturate_naive(), EULERS_ADD, EULERS_ASSIGN, EULERS_DIFF, FLOAT_ANGLE_NORMALIZE, foo, RATES_ADD, RATES_SMUL, and ref.
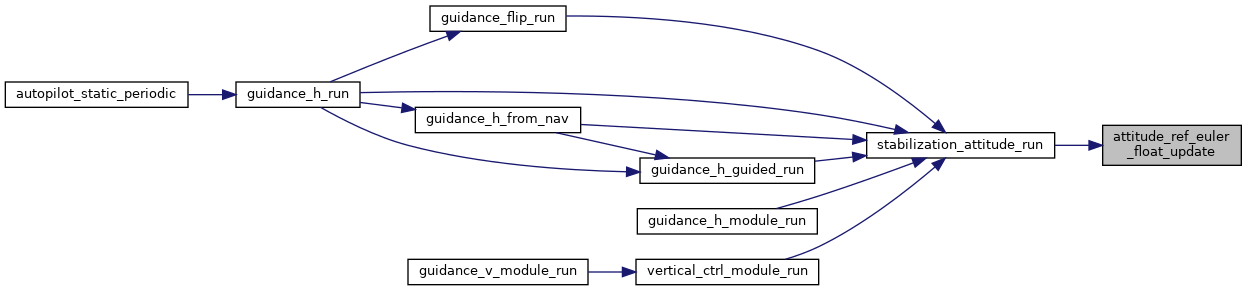
Referenced by stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 106 of file stabilization_attitude_ref_euler_float.c.
References FloatEulers::psi, and ref.
Referenced by attitude_ref_euler_float_enter().
Here is the caller graph for this function: