|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft attitude stabilization in euler int version. More...
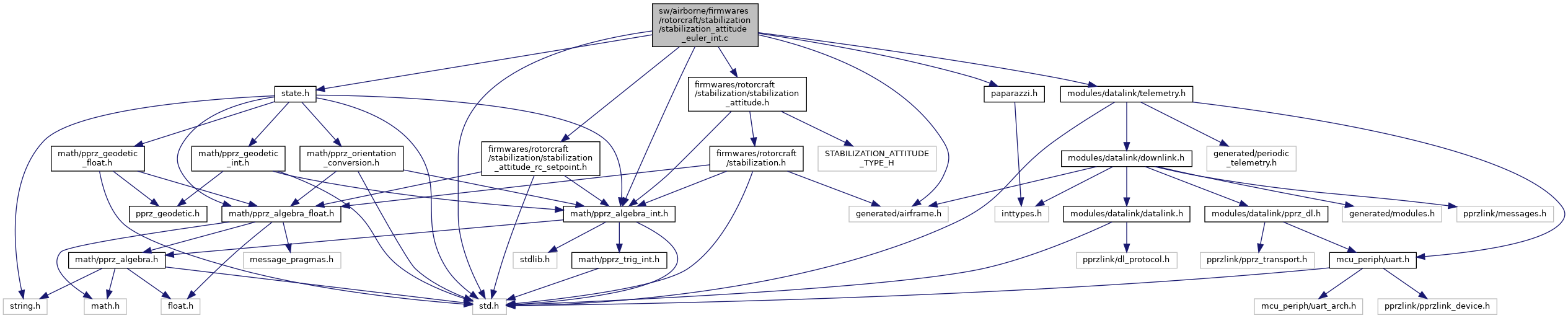
#include "std.h"#include "generated/airframe.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_euler_int.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_euler_int.h"#include "paparazzi.h"#include "state.h"#include "modules/datalink/telemetry.h" Include dependency graph for stabilization_attitude_euler_int.c:
Include dependency graph for stabilization_attitude_euler_int.c:Go to the source code of this file.
Macros | |
| #define | USE_ATTITUDE_REF 1 |
| explicitly define to zero to disable attitude reference generation | |
| #define | STABILIZATION_ATTITUDE_PHI_FFDGAIN 0 |
| explicitly define to zero to disable feed-forward rate term by default | |
| #define | STABILIZATION_ATTITUDE_THETA_FFDGAIN 0 |
| #define | STABILIZATION_ATTITUDE_PSI_FFDGAIN 0 |
| #define | OFFSET_AND_ROUND(_a, _b) (((_a)+(1<<((_b)-1)))>>(_b)) |
| #define | OFFSET_AND_ROUND2(_a, _b) (((_a)+(1<<((_b)-1))-((_a)<0?1:0))>>(_b)) |
| #define | MAX_SUM_ERR 4000000 |
| #define | CMD_SHIFT 11 |
Functions | |
| static void | reset_psi_ref_from_body (void) |
| static void | send_att (struct transport_tx *trans, struct link_device *dev) |
| static void | send_att_ref (struct transport_tx *trans, struct link_device *dev) |
| void | stabilization_attitude_euler_int_init (void) |
| void | stabilization_attitude_enter (void) |
| Attitude control enter function. | |
| void | stabilization_attitude_run (bool in_flight, struct StabilizationSetpoint *sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
| Attitude control run function. | |
Variables | |
| struct Int32AttitudeGains | stabilization_gains |
| struct Int32Eulers | stabilization_att_sum_err |
| int32_t | stabilization_att_fb_cmd [COMMANDS_NB] |
| int32_t | stabilization_att_ff_cmd [COMMANDS_NB] |
| static struct Int32Eulers | stab_att_sp_euler |
| static struct AttRefEulerInt | att_ref_euler_i |
Rotorcraft attitude stabilization in euler int version.
Definition in file stabilization_attitude_euler_int.c.
| #define CMD_SHIFT 11 |
| #define MAX_SUM_ERR 4000000 |
Definition at line 178 of file stabilization_attitude_euler_int.c.
Definition at line 175 of file stabilization_attitude_euler_int.c.
Definition at line 176 of file stabilization_attitude_euler_int.c.
| #define STABILIZATION_ATTITUDE_PHI_FFDGAIN 0 |
explicitly define to zero to disable feed-forward rate term by default
Definition at line 43 of file stabilization_attitude_euler_int.c.
| #define STABILIZATION_ATTITUDE_PSI_FFDGAIN 0 |
Definition at line 49 of file stabilization_attitude_euler_int.c.
| #define STABILIZATION_ATTITUDE_THETA_FFDGAIN 0 |
Definition at line 46 of file stabilization_attitude_euler_int.c.
| #define USE_ATTITUDE_REF 1 |
explicitly define to zero to disable attitude reference generation
Definition at line 38 of file stabilization_attitude_euler_int.c.
Definition at line 75 of file stabilization_attitude_euler_int.c.
References AttRefEulerInt::accel, att_ref_euler_i, AttRefEulerInt::euler, INT32_ANGLE_FRAC, Int32Eulers::psi, Int32Rates::r, AttRefEulerInt::rate, REF_ANGLE_FRAC, and stateGetNedToBodyEulers_i().
Referenced by stabilization_attitude_enter().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 86 of file stabilization_attitude_euler_int.c.
References Stabilization::cmd, dev, foo, Int32Rates::p, Int32Eulers::phi, Int32Eulers::psi, Int32Rates::q, Int32Rates::r, stab_att_sp_euler, stabilization, stabilization_att_fb_cmd, stabilization_att_ff_cmd, stabilization_att_sum_err, stateGetBodyRates_i(), stateGetNedToBodyEulers_i(), and Int32Eulers::theta.
Referenced by stabilization_attitude_euler_int_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 110 of file stabilization_attitude_euler_int.c.
References AttRefEulerInt::accel, att_ref_euler_i, dev, AttRefEulerInt::euler, foo, Int32Rates::p, Int32Eulers::phi, Int32Eulers::psi, Int32Rates::q, Int32Rates::r, AttRefEulerInt::rate, stab_att_sp_euler, and Int32Eulers::theta.
Referenced by stabilization_attitude_euler_int_init().
Here is the caller graph for this function:Attitude control enter function.
Definition at line 169 of file stabilization_attitude_euler_int.c.
References INT_EULERS_ZERO, reset_psi_ref_from_body(), and stabilization_att_sum_err.
Here is the call graph for this function:Definition at line 128 of file stabilization_attitude_euler_int.c.
References att_ref_euler_i, attitude_ref_euler_int_init(), Int32AttitudeGains::d, Int32AttitudeGains::dd, DefaultPeriodic, Int32AttitudeGains::ffd, foo, Int32AttitudeGains::i, INT_EULERS_ZERO, Int32AttitudeGains::p, register_periodic_telemetry(), send_att(), send_att_ref(), stab_att_sp_euler, stabilization_att_sum_err, STABILIZATION_ATTITUDE_PHI_FFDGAIN, STABILIZATION_ATTITUDE_PSI_FFDGAIN, STABILIZATION_ATTITUDE_THETA_FFDGAIN, stabilization_gains, and VECT3_ASSIGN.
Here is the call graph for this function:| void stabilization_attitude_run | ( | bool | in_flight, |
| struct StabilizationSetpoint * | sp, | ||
| struct ThrustSetpoint * | thrust, | ||
| int32_t * | cmd | ||
| ) |
Attitude control run function.
| [in] | in_flight | true if in flight |
| [in] | sp | pointer to the stabilization setpoint structure |
| [in] | thrust | pointer to the thrust setoint structure |
| [out] | cmd | pointer to the output command vector |
Definition at line 180 of file stabilization_attitude_euler_int.c.
References AttRefEulerInt::accel, att_ref_euler_i, attitude_ref_euler_int_update(), CMD_SHIFT, Int32AttitudeGains::d, Int32AttitudeGains::dd, AttRefEulerInt::euler, EULERS_ADD, EULERS_BOUND_CUBE, EULERS_DIFF, Int32AttitudeGains::ffd, foo, Int32AttitudeGains::i, INT32_ANGLE_FRAC, INT32_ANGLE_NORMALIZE, INT32_EULERS_LSHIFT, INT32_RATE_FRAC, INT_EULERS_ZERO, INT_RATES_ZERO, MAX_PPRZ, MAX_SUM_ERR, OFFSET_AND_ROUND, OFFSET_AND_ROUND2, Int32AttitudeGains::p, Int32Rates::p, Int32Eulers::phi, Int32Eulers::psi, Int32Rates::q, Int32Rates::r, AttRefEulerInt::rate, RATES_DIFF, REF_ANGLE_FRAC, REF_RATE_FRAC, stab_att_sp_euler, stab_sp_to_eulers_i(), stabilization_att_fb_cmd, stabilization_att_ff_cmd, stabilization_att_sum_err, stabilization_gains, stateGetBodyRates_i(), stateGetNedToBodyEulers_i(), th_sp_to_thrust_i(), Int32Eulers::theta, THRUST_AXIS_Z, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Here is the call graph for this function:
|
static |
Definition at line 73 of file stabilization_attitude_euler_int.c.
Referenced by reset_psi_ref_from_body(), send_att_ref(), stabilization_attitude_euler_int_init(), and stabilization_attitude_run().
|
static |
Definition at line 72 of file stabilization_attitude_euler_int.c.
Referenced by send_att(), send_att_ref(), stabilization_attitude_euler_int_init(), and stabilization_attitude_run().
| int32_t stabilization_att_fb_cmd[COMMANDS_NB] |
Definition at line 69 of file stabilization_attitude_euler_int.c.
Referenced by send_att(), and stabilization_attitude_run().
| int32_t stabilization_att_ff_cmd[COMMANDS_NB] |
Definition at line 70 of file stabilization_attitude_euler_int.c.
Referenced by send_att(), and stabilization_attitude_run().
| struct Int32Eulers stabilization_att_sum_err |
Definition at line 67 of file stabilization_attitude_euler_int.c.
Referenced by send_att(), stabilization_attitude_enter(), stabilization_attitude_euler_int_init(), and stabilization_attitude_run().
| struct Int32AttitudeGains stabilization_gains |
Definition at line 52 of file stabilization_attitude_euler_int.c.
Referenced by stabilization_attitude_euler_int_init(), and stabilization_attitude_run().