|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
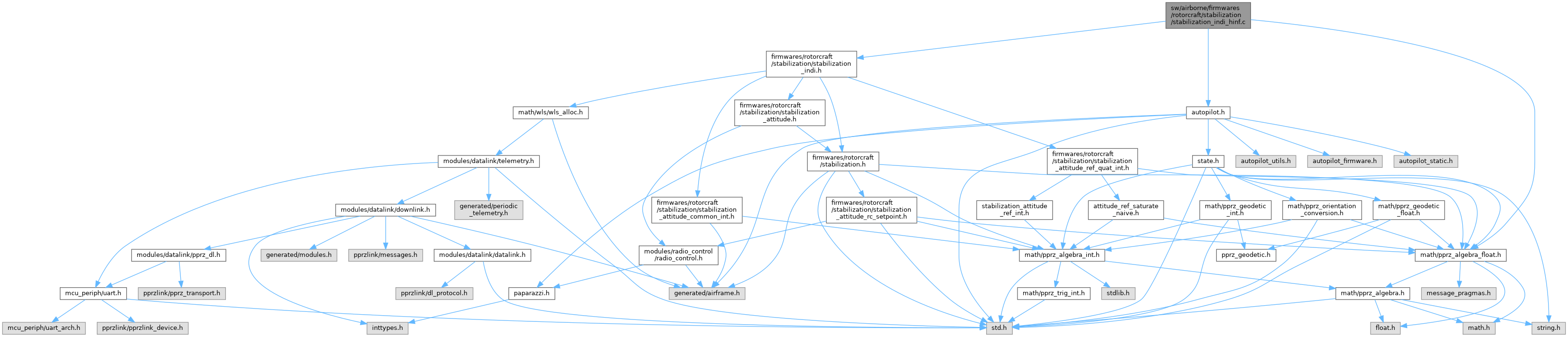
#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "math/pprz_algebra_float.h"#include "autopilot.h" Include dependency graph for stabilization_indi_hinf.c:
Include dependency graph for stabilization_indi_hinf.c:Go to the source code of this file.
Functions | |
| struct FloatRates | stabilization_indi_rate_controller (struct FloatRates rates, struct FloatRates sp) |
| Angular acceleration controller based on Hinfinity. | |
| struct FloatRates WEAK | stabilization_indi_attitude_controller (struct FloatQuat att, struct FloatQuat att_sp, struct FloatRates rates_ff) |
| Angular rate controller based on Hinfinity. | |
| struct FloatRates WEAK stabilization_indi_attitude_controller | ( | struct FloatQuat | att, |
| struct FloatQuat | att_sp, | ||
| struct FloatRates | rates_ff | ||
| ) |
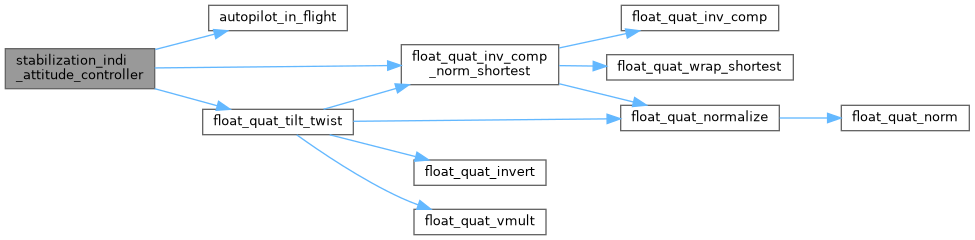
Angular rate controller based on Hinfinity.
Default PD angular rate controller.
Takes the current attitude filtered state and setpoint and compute the desired rates. Can be redefined elsewhere to use an other control scheme.
Definition at line 70 of file stabilization_indi_hinf.c.
References Ap, Indi_gains::att, att_state, autopilot_in_flight(), Bp, Cp, Dp, float_quat_inv_comp_norm_shortest(), float_quat_tilt_twist(), FLOAT_RATES_ZERO, foo, indi_gains, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, and RATES_ADD.
Here is the call graph for this function:| struct FloatRates stabilization_indi_rate_controller | ( | struct FloatRates | rates, |
| struct FloatRates | sp | ||
| ) |
Angular acceleration controller based on Hinfinity.
Default PD angular acceleration controller.
Takes the current rates filtered state and setpoint and compute the desired acceleration.
Definition at line 43 of file stabilization_indi_hinf.c.
References Ad, autopilot_in_flight(), Bd, Cd, Dd, FLOAT_RATES_ZERO, foo, indi_gains, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, rate_state, and RATES_DIFF.
Here is the call graph for this function:
|
static |
Definition at line 34 of file stabilization_indi_hinf.c.
|
static |
Definition at line 29 of file stabilization_indi_hinf.c.
|
static |
Definition at line 26 of file stabilization_indi_hinf.c.
Referenced by control_error_attitude(), control_error_rate(), and stabilization_indi_attitude_controller().
|
static |
Definition at line 35 of file stabilization_indi_hinf.c.
|
static |
Definition at line 30 of file stabilization_indi_hinf.c.
|
static |
Definition at line 36 of file stabilization_indi_hinf.c.
|
static |
Definition at line 31 of file stabilization_indi_hinf.c.
|
static |
Definition at line 37 of file stabilization_indi_hinf.c.
|
static |
Definition at line 32 of file stabilization_indi_hinf.c.
|
static |
Definition at line 25 of file stabilization_indi_hinf.c.
Referenced by stabilization_indi_rate_controller().