|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
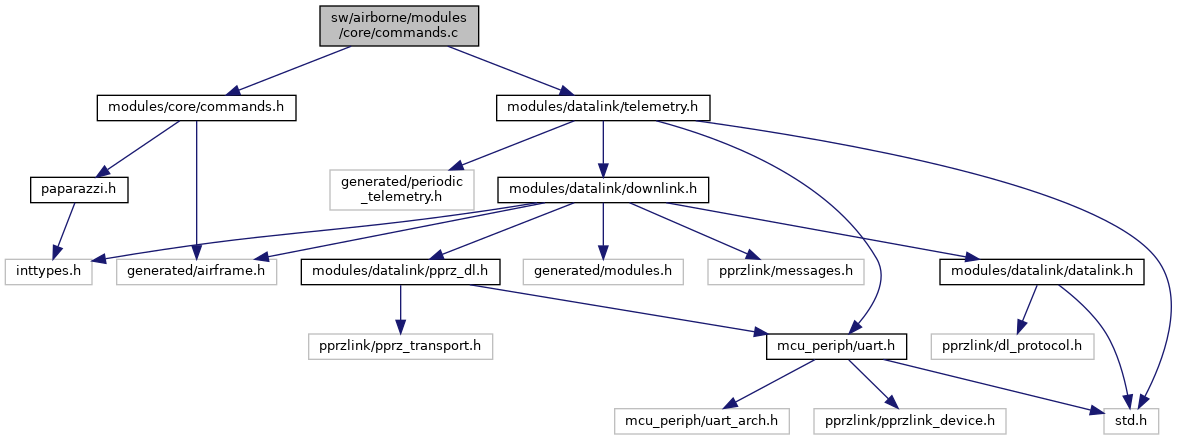
Hardware independent data structures for commands handling. More...
 Include dependency graph for commands.c:
Include dependency graph for commands.c:Go to the source code of this file.
Functions | |
| static void | send_commands (struct transport_tx *trans, struct link_device *dev) |
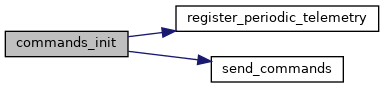
| void | commands_init (void) |
Variables | |
| pprz_t | commands [COMMANDS_NB] |
| const pprz_t | commands_failsafe [COMMANDS_NB] = COMMANDS_FAILSAFE |
| pprz_t | command_roll_trim = 0 |
| pprz_t | command_pitch_trim = 0 |
| pprz_t | command_yaw_trim = 0 |
Hardware independent data structures for commands handling.
Definition in file commands.c.
Definition at line 46 of file commands.c.
References command_pitch_trim, command_roll_trim, command_yaw_trim, commands_failsafe, DefaultPeriodic, foo, register_periodic_telemetry(), and send_commands().
Referenced by main_recovery_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 40 of file commands.c.
References commands, dev, and foo.
Referenced by commands_init().
Here is the caller graph for this function:| pprz_t command_pitch_trim = 0 |
Definition at line 34 of file commands.c.
Referenced by commands_init().
| pprz_t command_roll_trim = 0 |
Definition at line 33 of file commands.c.
Referenced by commands_init().
| pprz_t command_yaw_trim = 0 |
Definition at line 35 of file commands.c.
Referenced by commands_init().
| pprz_t commands[COMMANDS_NB] |
Definition at line 30 of file commands.c.
Referenced by send_commands().
| const pprz_t commands_failsafe[COMMANDS_NB] = COMMANDS_FAILSAFE |
Definition at line 31 of file commands.c.
Referenced by autopilot_static_periodic(), commands_init(), main_recovery_periodic(), main_task_periodic(), and rc_cb().