|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Vectornav VN-200 INS subsystem. More...
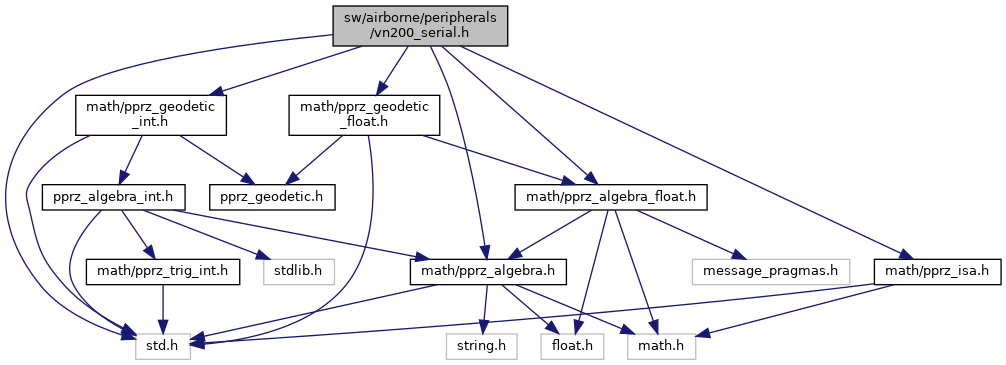
#include "std.h"#include "math/pprz_algebra.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_algebra_float.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_isa.h" Include dependency graph for vn200_serial.h: This graph shows which files directly or indirectly include this file:
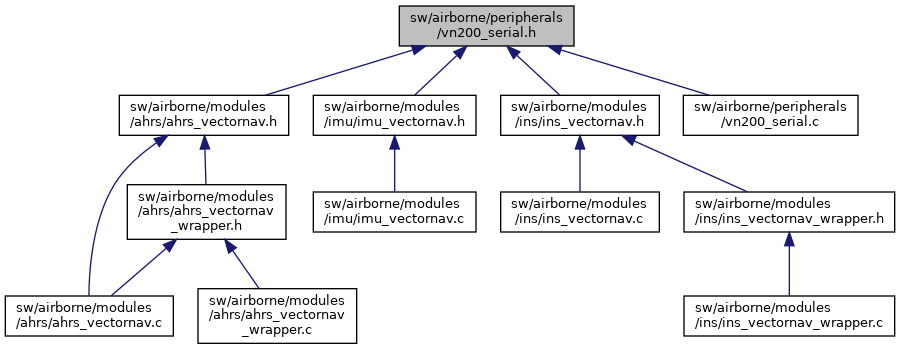
Include dependency graph for vn200_serial.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | VNPacket |
| struct | VNData |
Macros | |
| #define | VN_SYNC 0xFA |
| #define | VN_OUTPUT_GROUP 0x39 |
| #define | VN_GROUP_BYTES 8 |
| #define | VN_BUFFER_SIZE 512 |
| #define | VN_HEADER_SIZE 9 |
| #define | VN_PAYLOAD_SIZE 144 |
Enumerations | |
| enum | VNMsgStatus { VNMsgSync , VNMsgHeader , VNMsgGroup , VNMsgData , VNMsgCheck } |
| enum | VNStatus { VNNotTracking , VNOutOfSpecs , VNOK } |
Functions | |
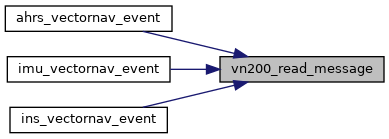
| void | vn200_event (struct VNPacket *vnp) |
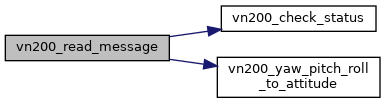
| void | vn200_read_message (struct VNPacket *vnp, struct VNData *vndata) |
| Read received message and populate data struct with new measurements. | |
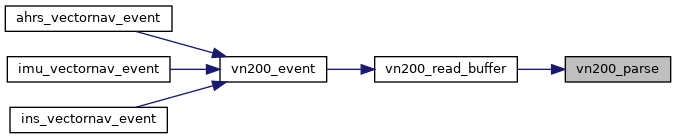
| void | vn200_parse (struct VNPacket *vnp, uint8_t c) |
| Packet Collection & state machine. | |
Vectornav VN-200 INS subsystem.
Definition in file vn200_serial.h.
| struct VNPacket |
Definition at line 61 of file vn200_serial.h.
| Data Fields | ||
|---|---|---|
| uint16_t | calc_chk | |
| uint32_t | chksm_error | |
| uint16_t | counter | |
| uint16_t | datalength | |
| uint16_t | framing_error | |
| uint32_t | hdr_error | |
| bool | msg_available | |
| uint8_t | msg_buf[VN_BUFFER_SIZE] | |
| uint8_t | msg_idx | |
| uint16_t | noise_error | |
| uint16_t | overrun_error | |
| uint16_t | rec_chk | |
| enum VNMsgStatus | status | |
| struct VNData |
Definition at line 83 of file vn200_serial.h.
Collaboration diagram for VNData:| Data Fields | ||
|---|---|---|
| struct FloatVect3 | accel | Acceleration in the imu frame, m/s. |
| struct FloatEulers | attitude | Attitude, float, [rad], yaw, pitch, roll. |
| uint8_t | err | see page 122 of VN-200 datasheet |
| uint8_t | gps_fix | None|2D|3D. |
| struct FloatRates | gyro | Rates in the imu frame m/s. |
| uint16_t | ins_status | see page 122 of VN-200 datasheet |
| struct FloatVect3 | lin_accel | Linear acceleration in imu frame [m/s^2]. |
| uint8_t | mode | 0-not tracking, 1 - poor performance, 2- OK |
| uint64_t | nanostamp | |
| uint8_t | num_sv | number of visible satellites |
| double | pos_lla[3] | |
| float | pos_u[3] | The current GPS position uncertainty in the North East Down (NED) coordinate frame, given in meters. |
| float | timestamp | Time since VN startup [s]. |
| uint64_t | tow | tow (in nanoseconds), uint64 |
| struct FloatVect3 | vel_body | The estimated velocity in the imu frame, given in m/s. |
| struct NedCoor_f | vel_ned | The estimated velocity in the North East Down (NED) frame, given in m/s. |
| float | vel_u | NED velocity uncertainty [m/s]. |
| float | ypr[3] | yaw, pitch, roll [deg] |
| struct FloatEulers | ypr_u | Attitude uncertainty, 1sigma, float, [degrees], yaw, pitch, roll. |
| #define VN_BUFFER_SIZE 512 |
Definition at line 48 of file vn200_serial.h.
| #define VN_GROUP_BYTES 8 |
Definition at line 46 of file vn200_serial.h.
| #define VN_HEADER_SIZE 9 |
Definition at line 49 of file vn200_serial.h.
| #define VN_OUTPUT_GROUP 0x39 |
Definition at line 45 of file vn200_serial.h.
| #define VN_PAYLOAD_SIZE 144 |
Definition at line 50 of file vn200_serial.h.
| #define VN_SYNC 0xFA |
Definition at line 44 of file vn200_serial.h.
| Enumerator | |
|---|---|
| VNMsgSync | |
| VNMsgHeader | |
| VNMsgGroup | |
| VNMsgData | |
| VNMsgCheck | |
Definition at line 53 of file vn200_serial.h.
| Enumerator | |
|---|---|
| VNNotTracking | |
| VNOutOfSpecs | |
| VNOK | |
Definition at line 77 of file vn200_serial.h.
Definition at line 113 of file vn200_serial.c.
References dev, foo, and vn200_read_buffer().
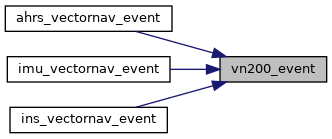
Referenced by ahrs_vectornav_event(), imu_vectornav_event(), and ins_vectornav_event().
Here is the call graph for this function: Here is the caller graph for this function:Packet Collection & state machine.
Definition at line 125 of file vn200_serial.c.
References foo, verify_chk(), VN_GROUP_BYTES, VN_HEADER_SIZE, VN_OUTPUT_GROUP, VN_PAYLOAD_SIZE, VN_SYNC, VNMsgData, VNMsgGroup, VNMsgHeader, and VNMsgSync.
Referenced by vn200_read_buffer().
Here is the call graph for this function: Here is the caller graph for this function:Read received message and populate data struct with new measurements.
Definition at line 184 of file vn200_serial.c.
References VNData::accel, VNData::attitude, foo, VNData::gps_fix, VNData::gyro, idx, VNData::ins_status, VNData::lin_accel, VNPacket::msg_buf, VNData::nanostamp, VNData::num_sv, VNData::pos_lla, VNData::pos_u, VNData::timestamp, VNData::tow, VNData::vel_body, VNData::vel_ned, VNData::vel_u, vn200_check_status(), vn200_yaw_pitch_roll_to_attitude(), VN_HEADER_SIZE, and VNData::ypr_u.
Referenced by ahrs_vectornav_event(), imu_vectornav_event(), and ins_vectornav_event().
Here is the call graph for this function: Here is the caller graph for this function: