|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Utility functions and includes for autopilots. More...
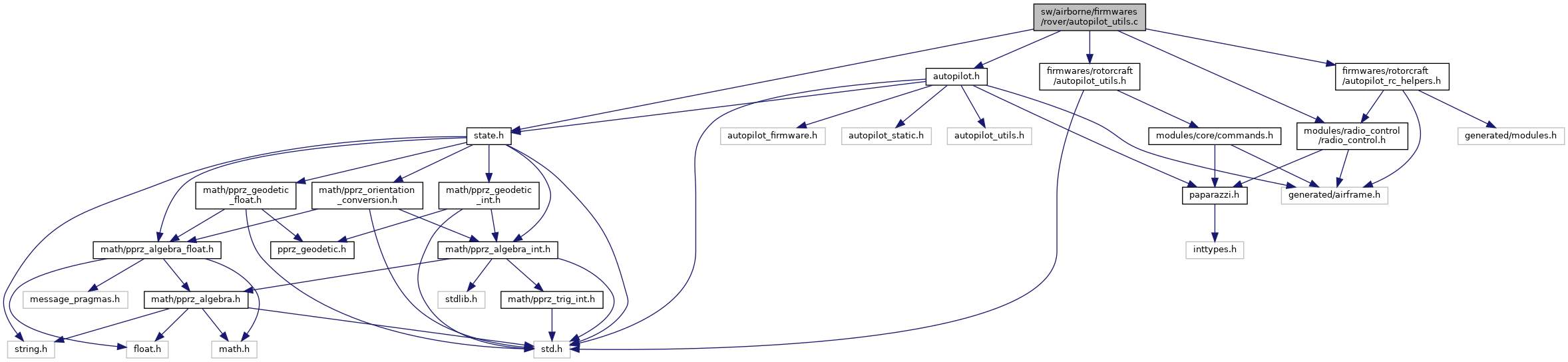
#include "firmwares/rotorcraft/autopilot_utils.h"#include "autopilot.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "state.h"#include "modules/radio_control/radio_control.h" Include dependency graph for autopilot_utils.c:
Include dependency graph for autopilot_utils.c:Go to the source code of this file.
Macros | |
| #define | THRESHOLD_1_PPRZ (MIN_PPRZ / 2) |
| Display descent speed in failsafe mode if needed. | |
| #define | THRESHOLD_2_PPRZ (MAX_PPRZ / 2) |
Functions | |
| uint8_t | ap_mode_of_3way_switch (void) |
| get autopilot mode as set by RADIO_MODE 3-way switch | |
Utility functions and includes for autopilots.
Definition in file autopilot_utils.c.
Display descent speed in failsafe mode if needed.
Definition at line 37 of file autopilot_utils.c.
Definition at line 38 of file autopilot_utils.c.
get autopilot mode as set by RADIO_MODE 3-way switch
Definition at line 41 of file autopilot_utils.c.
References MODE_AUTO1, MODE_AUTO2, MODE_MANUAL, radio_control, RADIO_MODE, THRESHOLD_1_PPRZ, THRESHOLD_2_PPRZ, and RadioControl::values.
Referenced by autopilot_static_on_rc_frame().
Here is the caller graph for this function: