|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Second order notch filter. More...
#include "std.h" Include dependency graph for notch_filter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for notch_filter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | SecondOrderNotchFilter |
Functions | |
| static void | notch_filter_set_sampling_frequency (struct SecondOrderNotchFilter *filter, uint16_t frequency) |
| Set sampling frequency of the notch filter. | |
| static void | notch_filter_set_bandwidth (struct SecondOrderNotchFilter *filter, float bandwidth) |
| Set bandwidth of the notch filter. | |
| static void | notch_filter_set_filter_frequency (struct SecondOrderNotchFilter *filter, float frequency) |
| Set notch filter frequency in Hz. | |
| static void | notch_filter_update (struct SecondOrderNotchFilter *filter, int32_t *input_signal, int32_t *output_signal) |
| Notch filter propagate. | |
| static int32_t | notch_filter_get_output (struct SecondOrderNotchFilter *filter) |
| Get latest notch filter output. | |
| static void | notch_filter_init (struct SecondOrderNotchFilter *filter, float cutoff_frequency, float bandwidth, uint16_t sample_frequency) |
| Initialize second order notch filter. | |
Second order notch filter.
Definition in file notch_filter.h.
| struct SecondOrderNotchFilter |
|
inlinestatic |
Get latest notch filter output.
| filter | filter data structure |
Definition at line 105 of file notch_filter.h.
References SecondOrderNotchFilter::yn1.
|
inlinestatic |
Initialize second order notch filter.
Discrete implementation: y[n] = b * y[n-1] - d^2 * y[n-2] + a * x[n] - b * x[n-1] + a * x[n-2]
| cutoff_frequency | frequency to attenuate [Hz] |
| bandwidth | bandwidth of the filter [Hz] |
| sample_frequency | frequency at which the filter is updated |
Definition at line 119 of file notch_filter.h.
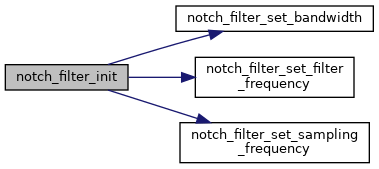
References foo, notch_filter_set_bandwidth(), notch_filter_set_filter_frequency(), notch_filter_set_sampling_frequency(), SecondOrderNotchFilter::xn1, SecondOrderNotchFilter::xn2, SecondOrderNotchFilter::yn1, and SecondOrderNotchFilter::yn2.
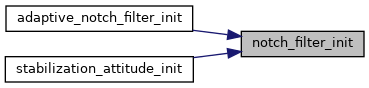
Referenced by adaptive_notch_filter_init(), init_filter(), and stabilization_attitude_heli_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Set bandwidth of the notch filter.
| filter | filter data structure |
| bandwidth | bandwidth of the filter [Hz] |
Definition at line 57 of file notch_filter.h.
References SecondOrderNotchFilter::d2, foo, and SecondOrderNotchFilter::Ts.
Referenced by notch_filter_init().
Here is the caller graph for this function:
|
inlinestatic |
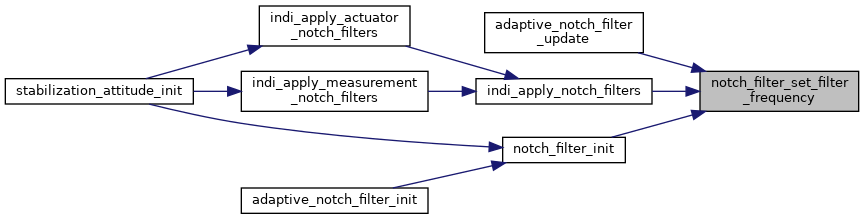
Set notch filter frequency in Hz.
| filter | filter data structure |
| frequency | to attenuate [Hz] |
Definition at line 68 of file notch_filter.h.
References SecondOrderNotchFilter::costheta, foo, and SecondOrderNotchFilter::Ts.
Referenced by adaptive_notch_filter_update(), indi_apply_notch_filters(), and notch_filter_init().
Here is the caller graph for this function:
|
inlinestatic |
Set sampling frequency of the notch filter.
| filter | filter data structure |
| frequency | frequency at which the filter is updated |
Definition at line 47 of file notch_filter.h.
References foo, and SecondOrderNotchFilter::Ts.
Referenced by notch_filter_init().
Here is the caller graph for this function:
|
inlinestatic |
Notch filter propagate.
Discrete implementation: y[n] = b * y[n-1] - d^2 * y[n-2] + a * x[n] - b * x[n-1] + a * x[n-2]
| filter | filter data structure |
| input_signal | input x[n] |
| output_signal | output y[n] |
Definition at line 83 of file notch_filter.h.
References b, SecondOrderNotchFilter::costheta, SecondOrderNotchFilter::d2, foo, SecondOrderNotchFilter::xn1, SecondOrderNotchFilter::xn2, SecondOrderNotchFilter::yn1, and SecondOrderNotchFilter::yn2.
Referenced by adaptive_notch_filter_update(), indi_apply_notch_filters(), and oneloop_andi_propagate_filters().
Here is the caller graph for this function: