|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

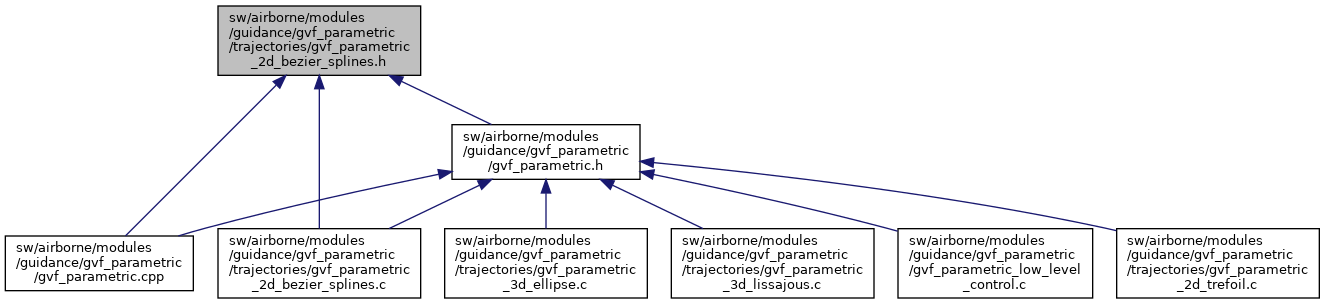
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_par_2d_bezier_par |
| struct | bezier_t |
Macros | |
| #define | GVF_PARAMETRIC_2D_BEZIER_N_SEG 1 |
Functions | |
| void | create_bezier_spline (bezier_t *bezier, float *px, float *py) |
| void | gvf_parametric_2d_bezier_splines_info (bezier_t *bezier, float *f1, float *f2, float *f1d, float *f2d, float *f1dd, float *f2dd) |
Variables | |
| gvf_par_2d_bezier_par | gvf_parametric_2d_bezier_par |
| struct gvf_par_2d_bezier_par |
Definition at line 36 of file gvf_parametric_2d_bezier_splines.h.
| Data Fields | ||
|---|---|---|
| float | kx | |
| float | ky | |
| struct bezier_t |
| #define GVF_PARAMETRIC_2D_BEZIER_N_SEG 1 |
Definition at line 27 of file gvf_parametric_2d_bezier_splines.h.
Definition at line 38 of file gvf_parametric_2d_bezier_splines.c.
References foo, and GVF_PARAMETRIC_2D_BEZIER_N_SEG.
Referenced by gvf_parametric_2D_bezier_wp().
Here is the caller graph for this function:
|
extern |
Definition at line 58 of file gvf_parametric_2d_bezier_splines.c.
References foo, gvf_parametric_control, and gvf_parametric_con::w.
Referenced by gvf_parametric_2D_bezier_XY().
Here is the caller graph for this function:
|
extern |
Definition at line 33 of file gvf_parametric_2d_bezier_splines.c.
Referenced by gvf_parametric_2D_bezier_wp(), and gvf_parametric_2D_bezier_XY().