|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Angular rate representations:
Collaboration diagram for Angular rate representations:Macros | |
| #define | RATE_I 0 |
| #define | RATE_F 1 |
Functions | |
| void | stateCalcBodyRates_i (void) |
| void | stateCalcBodyRates_f (void) |
| static bool | stateIsRateValid (void) |
| Test if rates are valid. | |
| static void | stateSetBodyRates_i (uint16_t id, struct Int32Rates *body_rate) |
| Set vehicle body angular rate (int). | |
| static void | stateSetBodyRates_f (uint16_t id, struct FloatRates *body_rate) |
| Set vehicle body angular rate (float). | |
| static struct Int32Rates * | stateGetBodyRates_i (void) |
| Get vehicle body angular rate (int). | |
| static struct FloatRates * | stateGetBodyRates_f (void) |
| Get vehicle body angular rate (float). | |
Variables | |
| uint8_t | State::rate_status |
| Holds the status bits for all angular rate representations. | |
| uint16_t | State::rates_input_filter |
| Holds the input filter id for rates. | |
| struct Int32Rates | State::body_rates_i |
| Angular rates in body frame. | |
| struct FloatRates | State::body_rates_f |
| Angular rates in body frame. | |
Definition at line 1371 of file state.c.
References State::body_rates_f, State::body_rates_i, foo, RATE_F, RATE_I, State::rate_status, RATES_FLOAT_OF_BFP, and state.
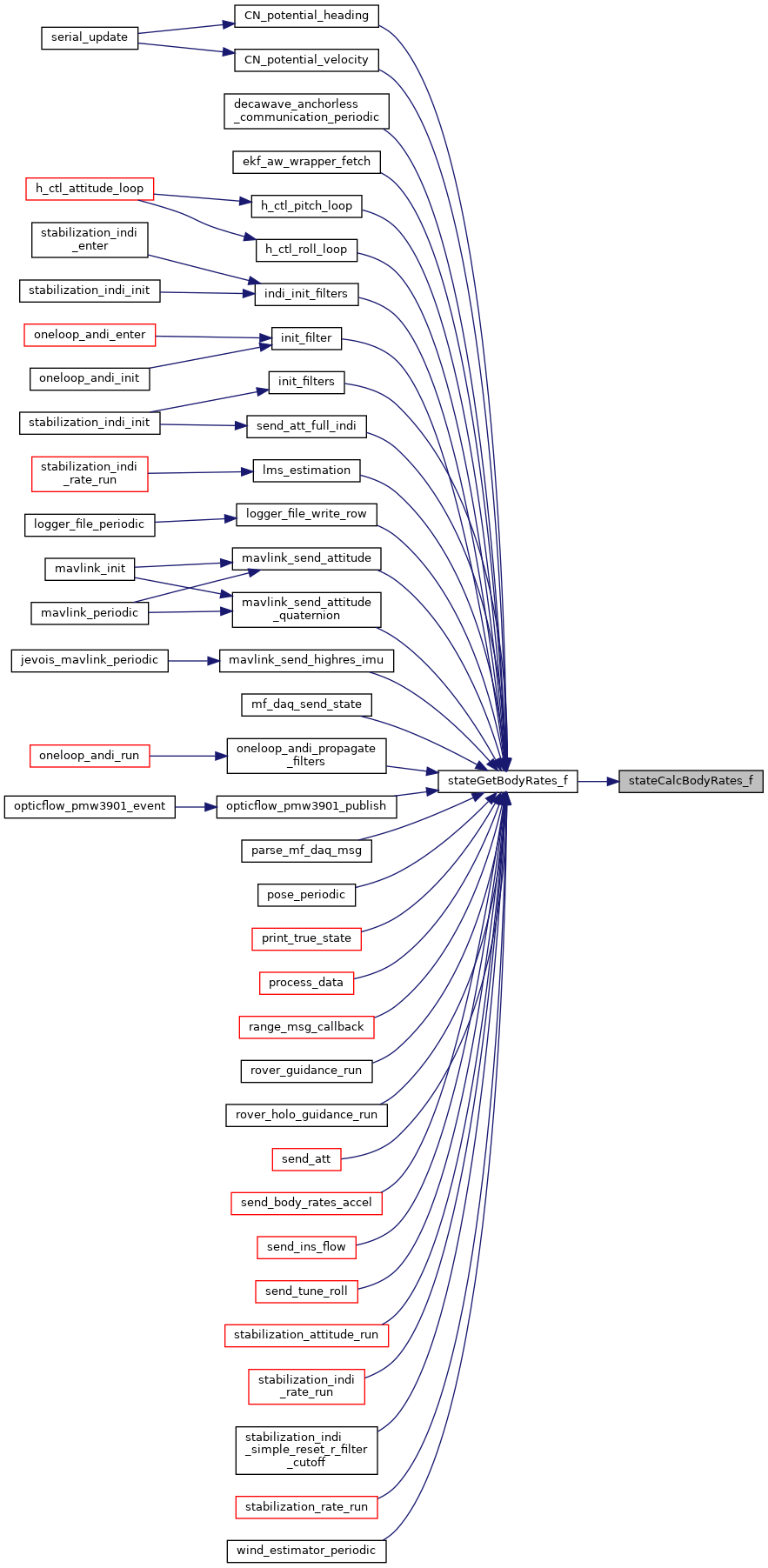
Referenced by stateGetBodyRates_f().
Here is the caller graph for this function:Definition at line 1356 of file state.c.
References State::body_rates_f, State::body_rates_i, foo, RATE_F, RATE_I, State::rate_status, RATES_BFP_OF_REAL, and state.
Referenced by stateGetBodyRates_i().
Here is the caller graph for this function:
|
inlinestatic |
Get vehicle body angular rate (float).
Definition at line 1375 of file state.h.
References State::body_rates_f, foo, RATE_F, State::rate_status, state, and stateCalcBodyRates_f().
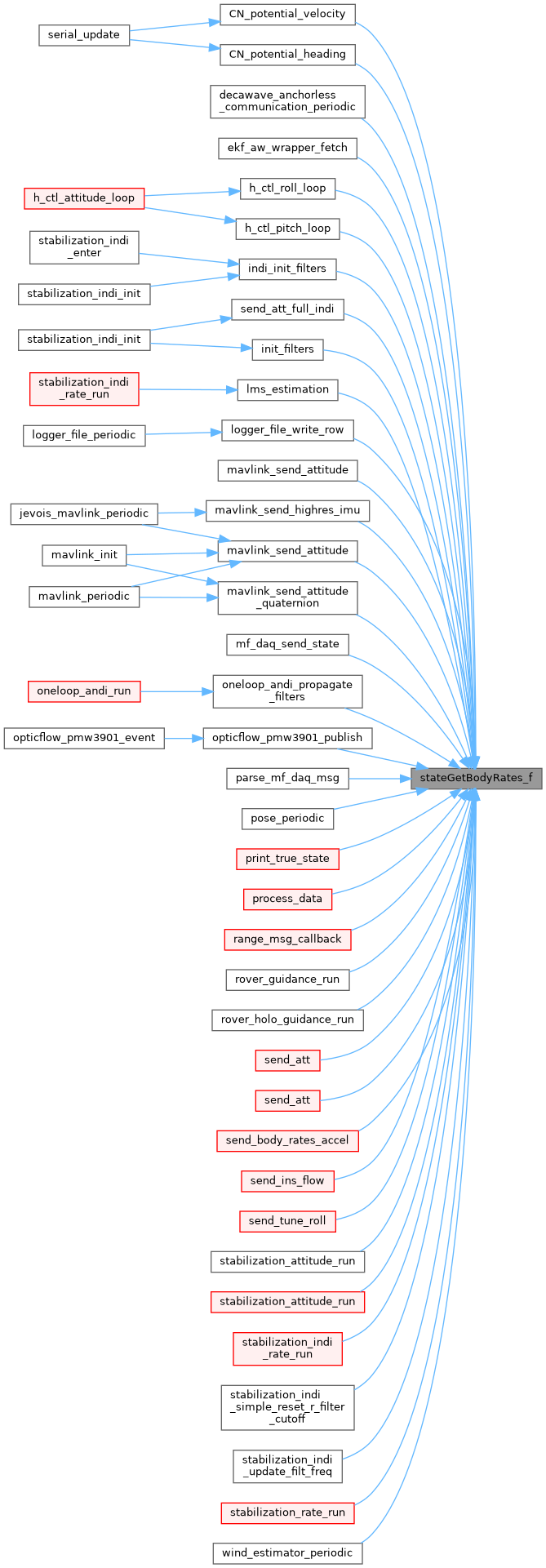
Referenced by CN_potential_heading(), CN_potential_velocity(), decawave_anchorless_communication_periodic(), ekf_aw_wrapper_fetch(), h_ctl_pitch_loop(), h_ctl_roll_loop(), indi_init_filters(), init_filters(), lms_estimation(), logger_file_write_row(), mavlink_send_attitude(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_highres_imu(), mf_daq_send_state(), oneloop_andi_propagate_filters(), opticflow_pmw3901_publish(), parse_mf_daq_msg(), pose_periodic(), print_true_state(), process_data(), range_msg_callback(), rover_guidance_run(), rover_holo_guidance_run(), send_att(), send_att(), send_att(), send_att_full_indi(), send_body_rates_accel(), send_ins_flow(), send_tune_roll(), stabilization_andi_enter(), stabilization_andi_run(), stabilization_attitude_plane_pid_run(), stabilization_attitude_run(), stabilization_attitude_run(), stabilization_indi_rate_run(), stabilization_indi_simple_reset_r_filter_cutoff(), stabilization_indi_update_filt_freq(), stabilization_rate_run(), and wind_estimator_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get vehicle body angular rate (int).
Definition at line 1366 of file state.h.
References State::body_rates_i, foo, RATE_I, State::rate_status, state, and stateCalcBodyRates_i().
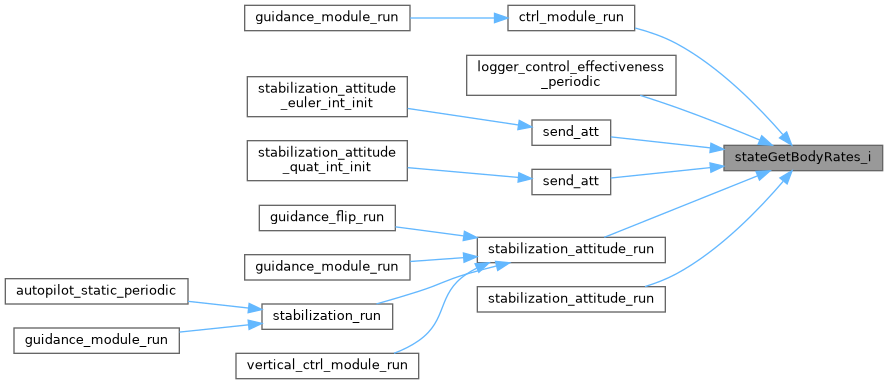
Referenced by ctrl_module_run(), logger_control_effectiveness_periodic(), send_att(), send_att(), stabilization_attitude_run(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:Test if rates are valid.
Definition at line 1336 of file state.h.
References State::rate_status, and state.
|
inlinestatic |
Set vehicle body angular rate (float).
Definition at line 1354 of file state.h.
References State::body_rates_f, RATE_F, State::rate_status, RATES_COPY, State::rates_input_filter, state, and STATE_CHECK_INPUT_AND_RETURN.
Referenced by ahrs_vectornav_propagate(), ArduIMU_event(), ArduIMU_periodic(), compute_body_orientation_and_rates(), compute_body_orientation_and_rates(), compute_body_orientation_and_rates(), ekf_run(), ins_ekf2_publish_attitude(), ins_float_invariant_propagate(), ins_vectornav_propagate(), set_body_orientation_and_rates(), set_body_state_from_quat(), set_state_from_ins(), sim_overwrite_ahrs(), update_ahrs_from_sim(), update_state_interface(), update_state_interface(), and vn100_event_task().
Here is the caller graph for this function:
|
inlinestatic |
Set vehicle body angular rate (int).
Definition at line 1344 of file state.h.
References State::body_rates_i, RATE_I, State::rate_status, RATES_COPY, State::rates_input_filter, state, and STATE_CHECK_INPUT_AND_RETURN.
Referenced by set_body_state_from_quat(), and set_body_state_from_quat().
Here is the caller graph for this function:| struct FloatRates State::body_rates_f |
Angular rates in body frame.
Units: rad/s
Definition at line 438 of file state.h.
Referenced by stateCalcBodyRates_f(), stateCalcBodyRates_i(), stateGetBodyRates_f(), and stateSetBodyRates_f().
| struct Int32Rates State::body_rates_i |
Angular rates in body frame.
Units: rad/s in BFP with INT32_RATE_FRAC
Definition at line 432 of file state.h.
Referenced by stateCalcBodyRates_f(), stateCalcBodyRates_i(), stateGetBodyRates_i(), and stateSetBodyRates_i().
| uint8_t State::rate_status |
Holds the status bits for all angular rate representations.
When the corresponding bit is one the representation is already computed.
Definition at line 421 of file state.h.
Referenced by stateCalcBodyRates_f(), stateCalcBodyRates_i(), stateGetBodyRates_f(), stateGetBodyRates_i(), stateInit(), stateIsRateValid(), stateSetBodyRates_f(), and stateSetBodyRates_i().
| uint16_t State::rates_input_filter |
Holds the input filter id for rates.
Definition at line 426 of file state.h.
Referenced by stateInit(), stateSetBodyRates_f(), stateSetBodyRates_i(), and stateSetInputFilter().