|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
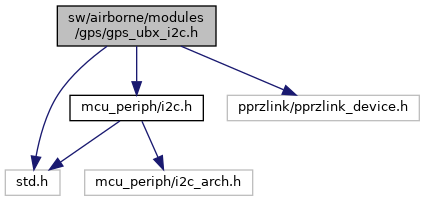
pprz link device for Ublox over I2C More...
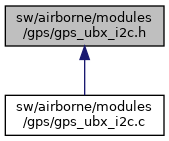
 Include dependency graph for gps_ubx_i2c.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gps_ubx_i2c.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | GpsUbxI2C |
| ubx_i2c state More... | |
Macros | |
| #define | GPS_I2C_BUF_SIZE 255 |
Typedefs | |
| typedef enum GpsI2CReadState | GpsI2CReadState |
| read states | |
| typedef enum GpsI2CWriteState | GpsI2CWriteState |
| write states | |
Enumerations | |
| enum | GpsI2CReadState { gps_i2c_read_standby , gps_i2c_read_sizeof , gps_i2c_read_data } |
| read states More... | |
| enum | GpsI2CWriteState { gps_i2c_write_standby , gps_i2c_write_request_size , gps_i2c_write_cfg } |
| write states More... | |
Functions | |
| void | gps_ubx_i2c_init (void) |
| init function | |
| void | gps_ubx_i2c_periodic (void) |
| handle message sending | |
| void | gps_ubx_i2c_read_event (void) |
| handle message reception | |
| bool | gps_i2c_tx_is_ready (void) |
| is driver ready to send a message | |
| void | gps_i2c_begin (void) |
| config is done, begin reading messages | |
| static void | GpsUbxi2cEvent (void) |
| i2c event | |
Variables | |
| struct GpsUbxI2C | gps_i2c |
pprz link device for Ublox over I2C
This module adds i2c functionality for the ublox using existing driver
Definition in file gps_ubx_i2c.h.
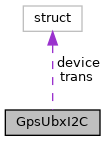
| struct GpsUbxI2C |
ubx_i2c state
Definition at line 61 of file gps_ubx_i2c.h.
Collaboration diagram for GpsUbxI2C:| Data Fields | ||
|---|---|---|
| int | baudrate | baudrate, unused |
| struct link_device | device | ppz link device |
| GpsI2CReadState | read_state | |
| uint8_t | rx_buf[GPS_I2C_BUF_SIZE] | receive buffer |
| uint16_t | rx_buf_avail | how many bytes are waiting to be read |
| uint16_t | rx_buf_idx | rx buf index |
| struct i2c_transaction | trans | i2c transaction |
| uint8_t | tx_buf[GPS_I2C_BUF_SIZE] | transmit buffer |
| uint16_t | tx_buf_idx | tx buf index |
| bool | tx_rdy | are we ready to transmit |
| GpsI2CWriteState | write_state | |
| #define GPS_I2C_BUF_SIZE 255 |
Definition at line 39 of file gps_ubx_i2c.h.
read states
write states
read states
| Enumerator | |
|---|---|
| gps_i2c_read_standby | dont read anything |
| gps_i2c_read_sizeof | read size of ubx buffer |
| gps_i2c_read_data | read data from ubx buffer |
Definition at line 43 of file gps_ubx_i2c.h.
write states
| Enumerator | |
|---|---|
| gps_i2c_write_standby | wait for gps_ubx to read buffer or ucenter to transmit |
| gps_i2c_write_request_size | request size of ubx buffer |
| gps_i2c_write_cfg | send a config msg and get reply |
Definition at line 52 of file gps_ubx_i2c.h.
config is done, begin reading messages
Definition at line 160 of file gps_ubx_i2c.c.
References gps_ubx_i2c_ucenter_done, and TRUE.
Referenced by gps_ubx_ucenter_periodic().
Here is the caller graph for this function:is driver ready to send a message
Definition at line 155 of file gps_ubx_i2c.c.
References gps_i2c, and GpsUbxI2C::tx_rdy.
Referenced by gps_ubx_ucenter_periodic().
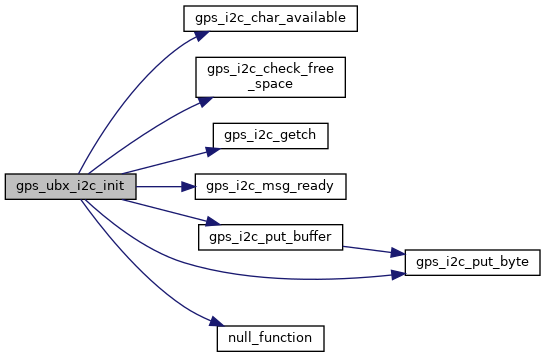
Here is the caller graph for this function:init function
< check if transmit buffer is not full
< put one byte
< put several bytes
< send completed buffer
< check if a new character is available
< get a new char
< set device baudrate
Definition at line 97 of file gps_ubx_i2c.c.
References GpsUbxI2C::device, FALSE, foo, gps_i2c, gps_i2c_char_available(), gps_i2c_check_free_space(), gps_i2c_getch(), gps_i2c_msg_ready(), gps_i2c_put_buffer(), gps_i2c_put_byte(), gps_i2c_read_standby, gps_i2c_write_standby, gps_ubx_i2c_ucenter_done, I2CTransDone, null_function(), GpsUbxI2C::read_state, GpsUbxI2C::rx_buf_avail, GpsUbxI2C::rx_buf_idx, i2c_transaction::status, GpsUbxI2C::trans, TRUE, GpsUbxI2C::tx_buf_idx, GpsUbxI2C::tx_rdy, and GpsUbxI2C::write_state.
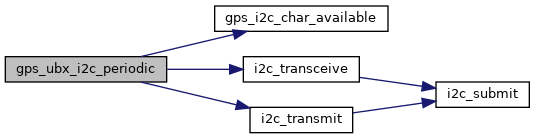
Here is the call graph for this function:handle message sending
Definition at line 170 of file gps_ubx_i2c.c.
References i2c_transaction::buf, foo, gps_i2c, GPS_I2C_ADDR_NB_AVAIL_BYTES, GPS_I2C_BUF_SIZE, gps_i2c_char_available(), gps_i2c_read_sizeof, gps_i2c_read_standby, GPS_I2C_SLAVE_ADDR, gps_i2c_write_cfg, gps_i2c_write_request_size, gps_i2c_write_standby, gps_ubx_i2c_bytes_to_read, gps_ubx_i2c_ucenter_done, i2c_transceive(), i2c_transmit(), I2CTransDone, GpsUbxI2C::read_state, i2c_transaction::status, GpsUbxI2C::trans, TRUE, GpsUbxI2C::tx_buf, GpsUbxI2C::tx_buf_idx, GpsUbxI2C::tx_rdy, and GpsUbxI2C::write_state.
Here is the call graph for this function:handle message reception
Definition at line 209 of file gps_ubx_i2c.c.
References i2c_transaction::buf, foo, gps_i2c, GPS_I2C_ADDR_DATA, GPS_I2C_BUF_SIZE, gps_i2c_read_data, gps_i2c_read_sizeof, gps_i2c_read_standby, GPS_I2C_SLAVE_ADDR, gps_i2c_write_request_size, gps_i2c_write_standby, gps_ubx_i2c_bytes_to_read, i2c_transceive(), I2CTransDone, GpsUbxI2C::read_state, GpsUbxI2C::rx_buf, GpsUbxI2C::rx_buf_avail, GpsUbxI2C::rx_buf_idx, i2c_transaction::status, GpsUbxI2C::trans, and GpsUbxI2C::write_state.
Referenced by GpsUbxi2cEvent().
Here is the call graph for this function: Here is the caller graph for this function:i2c event
Definition at line 101 of file gps_ubx_i2c.h.
References gps_i2c, gps_ubx_i2c_read_event(), I2CTransDone, I2CTransFailed, I2CTransSuccess, i2c_transaction::status, and GpsUbxI2C::trans.
Here is the call graph for this function:
|
extern |
Definition at line 50 of file gps_ubx_i2c.c.
Referenced by gps_i2c_char_available(), gps_i2c_check_free_space(), gps_i2c_getch(), gps_i2c_msg_ready(), gps_i2c_put_byte(), gps_i2c_tx_is_ready(), gps_ubx_i2c_init(), gps_ubx_i2c_periodic(), gps_ubx_i2c_read_event(), and GpsUbxi2cEvent().