|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Sensor driver for BMP3 sensor via I2C. More...
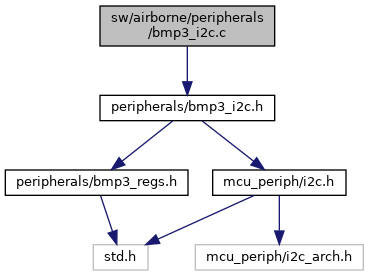
#include "peripherals/bmp3_i2c.h" Include dependency graph for bmp3_i2c.c:
Include dependency graph for bmp3_i2c.c:Go to the source code of this file.
Functions | |
| static void | parse_sensor_data (struct Bmp3_I2c *bmp) |
| local function to extract raw data from i2c buffer and compute compensation with selected precision | |
| static void | parse_calib_data (struct Bmp3_I2c *bmp) |
| This internal API is used to parse the calibration data, compensates it and store it in device structure. | |
| static double | compensate_pressure (struct Bmp3_I2c *bmp) |
| This internal API is used to compensate the raw pressure data and return the compensated pressure data in double data type. | |
| static double | compensate_temperature (struct Bmp3_I2c *bmp) |
| This internal API is used to compensate the raw temperature data and return the compensated temperature data in double data type. | |
| static double | bmp3_pow (double base, uint8_t power) |
| This internal API is used to calculate the power functionality for double precision floating point values. | |
| void | bmp3_i2c_init (struct Bmp3_I2c *bmp, struct i2c_periph *i2c_p, uint8_t addr) |
| init function | |
| void | bmp3_i2c_periodic (struct Bmp3_I2c *bmp) |
| Start new measurement if sensor ready. | |
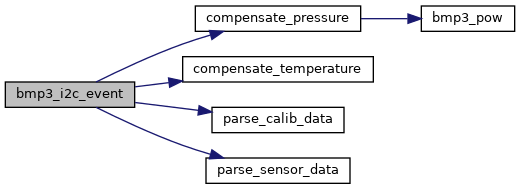
| void | bmp3_i2c_event (struct Bmp3_I2c *bmp) |
Sensor driver for BMP3 sensor via I2C.
Modified for Paparazzi from SDP3 driver from BoshSensortec see https://github.com/BoschSensortec/BMP3-Sensor-API for original code and license
Definition in file bmp3_i2c.c.
Definition at line 125 of file bmp3_i2c.c.
References BMP3_ALL, BMP3_STATUS_CONFIGURE, BMP3_STATUS_GET_CALIB, BMP3_STATUS_READ_DATA, BMP3_STATUS_UNINIT, compensate_pressure(), compensate_temperature(), foo, I2CTransDone, I2CTransFailed, I2CTransSuccess, parse_calib_data(), and parse_sensor_data().
Referenced by baro_bmp3_event().
Here is the call graph for this function: Here is the caller graph for this function:| void bmp3_i2c_init | ( | struct Bmp3_I2c * | bmp, |
| struct i2c_periph * | i2c_p, | ||
| uint8_t | addr | ||
| ) |
init function
Definition at line 60 of file bmp3_i2c.c.
References BMP3_STATUS_UNINIT, foo, I2CTransDone, and i2c_periph::status.
Referenced by baro_bmp3_init().
Here is the caller graph for this function:Start new measurement if sensor ready.
Definition at line 78 of file bmp3_i2c.c.
References BMP3_ALL, BMP3_CALIB_DATA_ADDR, BMP3_CALIB_DATA_LEN, BMP3_CONFIG_ADDR, BMP3_IIR_FILTER_COEFF_3, BMP3_NO_OVERSAMPLING, BMP3_NORMAL_MODE, BMP3_ODR_50_HZ, BMP3_ODR_ADDR, BMP3_OSR_ADDR, BMP3_OVERSAMPLING_8X, BMP3_P_AND_T_HEADER_DATA_LEN, BMP3_PWR_CTRL_ADDR, BMP3_SENS_STATUS_REG_ADDR, BMP3_STATUS_CONFIGURE, BMP3_STATUS_GET_CALIB, BMP3_STATUS_READ_DATA, BMP3_STATUS_UNINIT, foo, i2c_transceive(), i2c_transmit(), and I2CTransDone.
Referenced by baro_bmp3_periodic().
Here is the call graph for this function: Here is the caller graph for this function:This internal API is used to calculate the power functionality for double precision floating point values.
Definition at line 320 of file bmp3_i2c.c.
References foo.
Referenced by compensate_pressure().
Here is the caller graph for this function:This internal API is used to compensate the raw pressure data and return the compensated pressure data in double data type.
Definition at line 281 of file bmp3_i2c.c.
References bmp3_pow(), and foo.
Referenced by bmp3_i2c_event().
Here is the call graph for this function: Here is the caller graph for this function:This internal API is used to compensate the raw temperature data and return the compensated temperature data in double data type.
Definition at line 261 of file bmp3_i2c.c.
References foo.
Referenced by bmp3_i2c_event().
Here is the caller graph for this function:This internal API is used to parse the calibration data, compensates it and store it in device structure.
Definition at line 193 of file bmp3_i2c.c.
References BMP3_CONCAT_BYTES, and foo.
Referenced by bmp3_i2c_event().
Here is the caller graph for this function:local function to extract raw data from i2c buffer and compute compensation with selected precision
Definition at line 166 of file bmp3_i2c.c.
References foo.
Referenced by bmp3_i2c_event().
Here is the caller graph for this function: